一种基于网联车的路侧数据交通分析方法及装置
本发明涉及路侧数据分析,具体涉及一种基于网联车的路侧数据交通分析方法及装置。
背景技术:
1、交通信息感知是交通信息基础设施的重要功能之一,为交通态势预测、信号控制等交通应用场景提供必要的数据和决策支持。目前常见的交通信息态势感知手段主要有地磁线圈、雷达、视频、红外等,但这些单一的交通信息感知设备一般缺乏全面的信息感知和高精度。路侧传感器具有广泛的探测范围,且还配备强大的边缘计算能力。随着5g通信技术的出现,通过高带宽、低时延的特性大幅提高信息传输速率,使得智能网联车辆在视觉范围之外实时提供路侧感知信息成为可能。
2、现有技术中,只是通过路侧毫米波雷达和摄像机,获取交叉口附近车辆的运动轨迹数据,但是获取的数据的精度不能满足实际需求。而前在道路上运行的网联车普及率较低,以及车辆到路侧基础设施(vehicle-to-infrastructure, v2i)通信的部署有限,现有大量研究基于不同网联车渗透率建立交通状态估计模型,如冲击波模型、车辆运动学模型等,来估计车辆到达信息。然而,任何估计模型都存在误差,从而导致交叉口的通行数据精度较低。
3、因此,急需提出一种基于网联车的路侧数据交通分析方法及装置,解决现有技术中路侧毫米波雷达、摄像机和网联车的估计模型,都无法得到满足精度的交叉口的通行信息的技术问题。
技术实现思路
1、有鉴于此,有必要提供一种基于网联车的路侧数据交通分析方法及装置,用以解决现有技术中路侧毫米波雷达、摄像机和网联车的估计模型,都无法得到满足精度的交叉口的通行信息的技术问题。
2、一方面,本发明提供了一种基于网联车的路侧数据交通分析方法,包括:
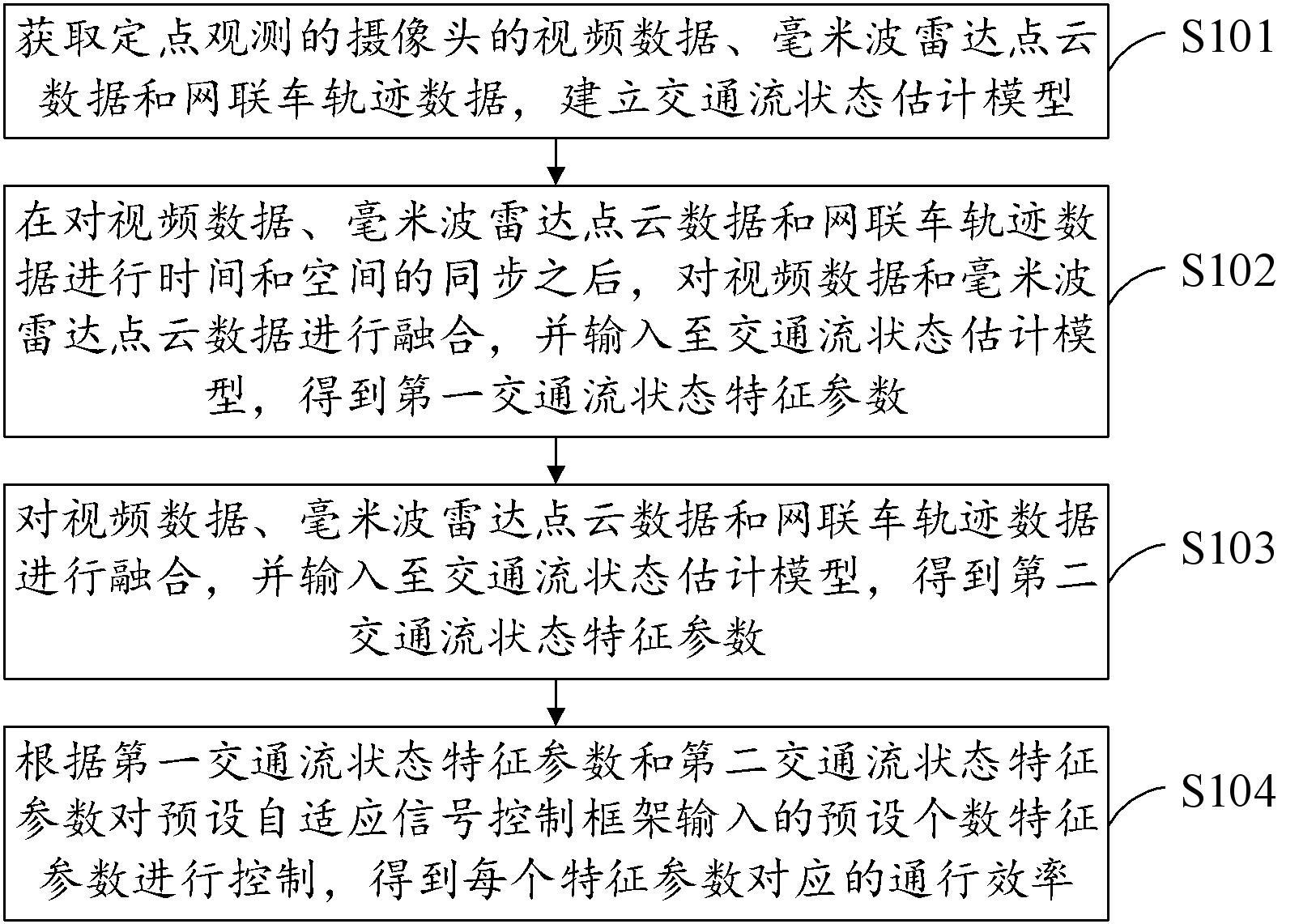
3、获取定点观测的摄像头的视频数据、毫米波雷达点云数据和网联车轨迹数据,建立交通流状态估计模型;
4、在对所述视频数据、所述毫米波雷达点云数据和所述网联车轨迹数据进行时间和空间的同步之后,对所述视频数据和所述毫米波雷达点云数据进行融合,并输入至所述交通流状态估计模型,得到第一交通流状态特征参数;
5、对所述视频数据、所述毫米波雷达点云数据和所述网联车轨迹数据进行融合,并输入至所述交通流状态估计模型,得到第二交通流状态特征参数;
6、根据所述第一交通流状态特征参数和所述第二交通流状态特征参数对预设自适应信号控制框架输入的预设个数特征参数进行控制,得到每个特征参数对应的通行效率。
7、在一些可能的实现方式中,所述获取定点观测的摄像头的视频数据、毫米波雷达点云数据和网联车轨迹数据,建立交通流状态估计模型之后,所述方法还包括:
8、根据张正友标定法确定所述摄像头拍摄的多个角度的棋盘格,并标定所述摄像头的内参和外参;
9、根据所述多个角度的棋盘格、所述内参和所述外参,将所述视频数据中的世界坐标系转换至像素坐标系,得到像素视频数据。
10、在一些可能的实现方式中,所述获取定点观测的摄像头的视频数据、毫米波雷达点云数据和网联车轨迹数据,建立交通流状态估计模型之后,所述方法还包括:
11、基于深度学习算法对所述像素视频数据进行检测,得到目标车辆,并对所述目标车辆进行跟踪,得到第一车辆轨迹;
12、根据所述第一车辆轨迹,得到第一特征参数;
13、对所述毫米波雷达点云数据进行聚类预处理,得到聚类点云数据;
14、基于车辆运动学模型对所述聚类点云数据中的所述目标车辆进行跟踪,得到第二车辆轨迹,并构建卡尔曼状态转移矩阵;
15、根据所述第二车辆轨迹和所述卡尔曼状态转移矩阵,得到第二特征参数;
16、对所述网联车轨迹数据进行检测,得到第三车辆轨迹和第三特征参数。
17、在一些可能的实现方式中,所述对所述视频数据、所述毫米波雷达点云数据和所述网联车轨迹数据进行时间和空间的同步,包括:
18、将所述视频数据的所述第一车辆轨迹、所述毫米波雷达点云数据的所述第二车辆轨迹、以及所述网联车轨迹数据的所述第三车辆轨迹转换至像素坐标系下;
19、根据所述第二车辆轨迹的采样频率,对所述第一车辆轨迹和所述第三车辆轨迹进行逐帧提取,得到所述第一车辆轨迹对应的第一提取轨迹和所述第三车辆轨迹对应的第二提取轨迹。
20、在一些可能的实现方式中,所述对所述视频数据和所述毫米波雷达点云数据进行融合,并输入至所述交通流状态估计模型,得到第一交通流状态特征参数,包括:
21、将所述第二车辆轨迹和所述第一提取轨迹中相应时刻的数据进行融合,得到第一融合轨迹;
22、将所述第一融合轨迹、所述第一特征参数和所述第二特征参数输入至所述交通流状态估计模型,得到第一交通流状态特征参数。
23、在一些可能的实现方式中,所述对所述视频数据、所述毫米波雷达点云数据和所述网联车轨迹数据进行融合,并输入至所述交通流状态估计模型,得到第二交通流状态特征参数,包括:
24、将所述第二车辆轨迹、所述第一提取轨迹和所述第二提取轨迹中相应时刻的数据进行融合,得到第二融合轨迹;
25、将所述第二融合轨迹、所述第一特征参数、所述第二特征参数和所述第三特征参数输入至所述交通流状态估计模型,得到第二交通流状态特征参数。
26、在一些可能的实现方式中,所述根据所述第一交通流状态特征参数和所述第二交通流状态特征参数对预设自适应信号控制框架输入的预设个数特征参数进行控制,得到每个特征参数对应的通行效率,包括:
27、对所述第一交通流状态特征参数和所述第二交通流状态特征参数进行对比分析,得到所述网联车轨迹数据对所述定点观测的效果的分析结果;
28、根据所述分析结果对所述预设自适应信号控制框架输入的所述预设个数特征参数进行控制,得到所述每个特征参数对应的通行效率。
29、在一些可能的实现方式中,所述根据所述分析结果对所述预设自适应信号控制框架输入的所述预设个数特征参数进行控制,得到所述每个特征参数对应的通行效率,包括:
30、根据所述分析结果,确定目标特征参数;
31、分别对所述每个特征参数的数值进行修改,得到所述每个特征参数对应的参数数值;
32、将所述每个特征参数对应的所述参数数值输入至所述预设自适应信号控制框架,得到所述目标特征参数的变化情况,并根据所述变化情况,得到所述每个特征参数对应的通行效率。
33、在一些可能的实现方式中,所述将所述每个特征参数对应的所述参数数值输入至所述预设自适应信号控制框架,得到所述目标特征参数的变化情况,并根据所述变化情况,得到所述每个特征参数对应的通行效率,包括:
34、将所述预设个数特征参数中第一特征参数对应的参数数值输入至所述预设自适应信号控制框架,得到所述目标特征参数的变化情况;
35、根据所述变化情况,得到所述第一特征参数对应的通行效率;
36、判断所述预设个数特征参数中是否存在未输入至所述预设自适应信号控制框架的第二特征参数;
37、若是,则将所述第二特征参数对应的参数数值输入至所述预设自适应信号控制框架,得到所述第二特征参数对应的通行效率;
38、若否,则得到所述每个特征参数对应的通行效率。
39、另一方面,本发明还提供了一种基于网联车的路侧数据交通分析装置,包括:
40、数据获取模块,用于获取定点观测的摄像头的视频数据、毫米波雷达点云数据和网联车轨迹数据,建立交通流状态估计模型;
41、第一数据融合模块,用于在对所述视频数据、所述毫米波雷达点云数据和所述网联车轨迹数据进行时间和空间的同步之后,对所述视频数据和所述毫米波雷达点云数据进行融合,并输入至所述交通流状态估计模型,得到第一交通流状态特征参数;
42、第二数据融合模块,用于对所述视频数据、所述毫米波雷达点云数据和所述网联车轨迹数据进行融合,并输入至所述交通流状态估计模型,得到第二交通流状态特征参数;
43、效率确定模块,用于根据所述第一交通流状态特征参数和所述第二交通流状态特征参数对预设自适应信号控制框架输入的预设个数特征参数进行控制,得到每个特征参数对应的通行效率。
44、采用上述实施例的有益效果是:本发明提供的基于网联车的路侧数据交通分析方法,对视频数据、毫米波雷达点云数据和网联车轨迹数据进行同步之后又进行了融合,从而可以对摄像头、毫米波雷达的数据和网联车轨迹数据进行相互补充,还建立了交通流状态估计模型,通过交通流状态估计模型对交通流状态估计模型进行估计,提高了交通流状态特征参数的精度。进一步的,还设置了预设自适应信号控制框架,根据第一交通流状态特征参数和第二交通流状态特征参数输入的预设个数特征参数进行控制,从而可以得到每个特征参数对应的通行效率,实现了对不同的特征参数进行分析,得到每个特征参数对交通的信号控制的作用的目的。
- 还没有人留言评论。精彩留言会获得点赞!