基于电网挂接引流线装置的气路连接方法与流程
本发明中涉及电力施工,特别涉及基于电网挂接引流线装置的气路连接方法。
背景技术:
1、随着现代化工业的迅速发展和人民生活水平的提高,电力用户对供电可靠性的要求也在不断提高,为了减少停电时间甚至不停电,各地供电公司加快了10kv配电网带电作业的开展与推广,电工人员主要采用绝缘手套作业法与绝缘杆作业法,对人体伤害很大,危险系数很高。
2、用机器人替代人工作业将是今后运行与检修的发展趋势,现有的机器人在作业时,主要靠升降机将机器人托举到工作高度,升降机被风吹动或发生晃动会影响到机器人的工作,使用不方便,因此我们公开了基于电网挂接引流线装置的气路连接方法来满足人们的需求。
技术实现思路
1、本技术的目的在于提供基于电网挂接引流线装置的气路连接方法,以解决上述背景技术中提出的现有的机器人在作业时,主要靠升降机将机器人托举到工作高度,升降机被风吹动或发生晃动会影响到机器人的工作,使用不方便的问题。
2、为实现上述目的,本技术提供如下技术方案:基于电网挂接引流线装置的气路连接方法,该方法包括:
3、s1、通过升降机将机器人本体托举至作业高度;
4、s2、机器人本体通过固定组件稳固在线路上;
5、s3、机器人本体进行作业,挂接引流线。
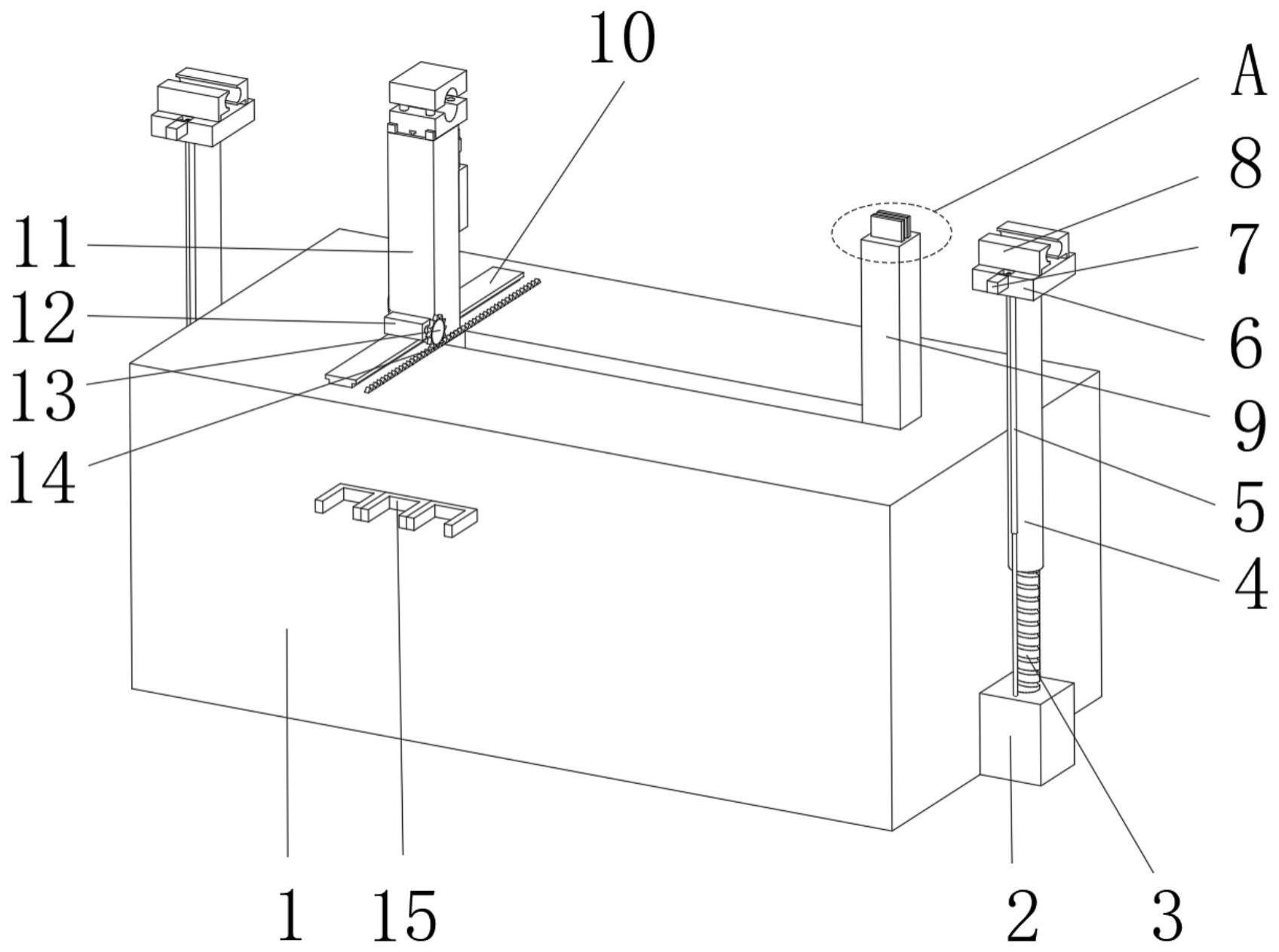
6、优选的,所述固定组件包括安装块,所述安装块通过升降组件与所述机器人本体相连接,所述安装块的顶部开设有滑动槽,所述滑动槽内滑动安装有两个带动块,两个所述带动块的顶部均安装有夹紧块,所述机器人本体的一侧均匀安装有多个顶线夹,所述安装块上安装有动力组件,所述机器人本体上安装有线夹组件,所述机器人本体上安装有夹线组件。
7、进一步的,通过安装块的设置,在两个带动块和两个夹紧块的配合下,可以将线缆夹紧,通过升降组件,使得机器人本体在作业时更加的稳定,使用起来更加的方便,实用性好。
8、优选的,所述升降组件包括螺纹套筒,所述螺纹套筒安装于所述安装块的底部,所述机器人本体的一侧安装有驱动电机,所述驱动电机的输出轴上安装有螺纹杆,所述螺纹杆的一端延伸至所述螺纹套筒内,所述驱动电机上安装有稳定单元。
9、进一步的,通过螺纹套筒的设置,在升降机将机器人本体托举至工作高度后,然后驱动电机启动,带动螺纹杆转动,在稳定单元的配合下,螺纹套筒带动安装块向上移动,移动到合适的位置后,便于两个夹紧块将线缆夹紧,使用起来更加的简单方便,实用性好。
10、优选的,所述稳定单元包括伸缩杆,所述伸缩杆安装于所述驱动电机的顶部,所述伸缩杆的顶端与所述安装块的底部相连接。
11、进一步的,通过伸缩杆的设置,可以在螺纹杆转动后,使得螺纹套筒可以稳定的上下移动,使用起来更加的方便。
12、优选的,所述动力组件包括夹紧电机,所述夹紧电机安装于所述安装块的一侧,所述滑动槽内转动安装有正反丝杆,两个所述带动块的一侧均开设有与所述正反丝杆相适配的螺纹孔,所述正反丝杆的一端贯穿两个所述螺纹孔,所述夹紧电机的一端贯穿所述安装块并与所述正反丝杆的一端相连接。
13、进一步的,通过夹紧电机的设置,升降机将机器人本体托举至工作高度,然后驱动电机启动,带动螺纹杆转动,在伸缩杆的配合下,螺纹套筒带动安装块向上移动,使得线缆位于两个夹紧块之间,之后夹紧电机启动,带动正反丝杆转动,正反丝杆使得两个带动块相互靠近,使得两个夹紧块相互靠近,将线缆夹在两个夹紧块之间,使得机器人本体在工作时更加的稳定,实用性好。
14、优选的,所述线夹组件包括底线夹,所述机器人本体的顶部安装有t形块,所述t形块上滑动安装有滑动块,所述滑动块的顶部安装有t形固定块,所述底线夹滑动安装于所述t形固定块上,所述底线夹的顶部对称安装有两个固定杆,两个所述固定杆的顶部安装有顶线夹,所述底线夹的底端开设有两个螺纹通孔,两个所述螺纹通孔内均螺纹安装有固定螺栓,所述顶线夹的底部开设有两个与所述固定螺栓相适配的螺纹固定孔,所述滑动块上安装有限位单元,所述滑动块上安装有驱动组件,所述滑动块上安装有安装组件。
15、进一步的,通过底线夹的设置,在进行搭接引流线时,将线缆卡入顶线夹和底线夹之间,之后通过夹线组件将引流线放入顶线夹和底线夹之间,便于线缆和引流线之间的衔接,使用起来更加的简单方便,实用性好。
16、优选的,所述限位单元包括两个限位块,两个所述限位块对称安装于所述滑动块的顶部。
17、进一步的,通过两个限位块的设置,可以对底线夹的位置进行限定,方便使用。
18、优选的,所述驱动组件包括移动电机,所述移动电机安装于所述滑动块的一侧,所述移动电机的输出轴上安装有齿轮,所述机器人本体的顶部均匀安装有多个齿牙,所述齿牙与所述齿轮相啮合。
19、进一步的,通过移动电机的设置,在齿轮和齿牙的配合下,可以带动滑动块在t形块上移动,使用更加方便。
20、优选的,所述安装组件包括两个气动螺丝刀,两个所述气动螺丝刀与所述固定螺栓相适配,所述滑动块的一侧对称安装有两个气缸,两个所述气动螺丝刀分被安装于两个所述气缸的输出端上,两个所述气缸的底部均安装有连接气管,两个所述连接气管的一端安装有转接头,所述转接头的底部安装有主气管,所述主气管的一端安装于所述机器人本体的顶部。
21、进一步的,通过气动螺丝刀的设置,在气缸的配合下,便于对固定螺栓进行转动,方便使用。
22、优选的,所述夹线组件包括两个夹块,所述机器人本体的顶部开设有长滑槽,所述长滑槽内滑动安装有移动臂,两个所述夹块滑动安装于所述移动臂的顶部,两个所述夹块相互靠近的一侧均安装有防滑垫。
23、进一步的,通过夹块的设置,在防滑垫的配合下,可以增大摩擦力,在移动臂的作用下,方便带动引流线移动。
24、综上,本发明的技术效果和优点:
25、1、本发明中,在使用时,通过升降机将机器人本体托举至工作高度,然后驱动电机启动,带动螺纹杆转动,在伸缩杆的配合下,螺纹套筒带动安装块向上移动,使得线缆位于两个夹紧块之间,之后夹紧电机启动,带动正反丝杆转动,正反丝杆使得两个带动块相互靠近,使得两个夹紧块相互靠近,将线缆夹在两个夹紧块之间,使得机器人本体在工作时更加的稳定,使用起来更加的简单方便,实用性好。
26、2、本发明中,在安装时,将主气管的一端安装上转接头,之后将气缸上的连接气管安装在转接头上,通过连接气管,给气缸和气动螺丝刀提供动力,减少了气路管线,使得排线更加的简单,同时减少了气能的浪费,节约了资源,使用起来更加的方便,实用性好。
27、3、本发明中,在进行搭接引流线时,移动电机启动,带动齿轮转动,在齿牙的配合下,使得滑动块在t形块上移动,将线缆卡入顶线夹和底线夹之间,之后移动臂移动,带动夹块和引流线移动,将引流线插入顶线夹和底线夹之间,气缸启动,使得气动螺丝刀向上移动,之后气动螺丝刀启动,转动固定螺栓,将线缆和引流线按压在一起,使用起来更加的简单方便,实用性好。
- 还没有人留言评论。精彩留言会获得点赞!