自动化生产过程中的穿梭车调度方法及装置与流程
本发明涉及自动化生产,具体而言,涉及一种自动化生产过程中的穿梭车调度方法及装置。
背景技术:
1、与传统的仓库管理模式不同,多深度穿梭车立体库允许货物在同一库位的不同深度进行存放,极大地提高了存储空间的利用率。这种涉及步进减少了地面空间的占用,还通过垂直扩展的方式,将存储空间向高空发展,实现了存储量的显著增加。智能立体仓库wms(warehouse management system)与wcs(warehouse control system)系统软件结合仓储设备,以其高效、智能、灵活、可扩展以及绿色环保的特点,逐步成为现代物流、存储与管理的重要选择。
2、然而,多深度穿梭车立体库容易出现穿梭车在不同层之间频繁换层,在车辆换层时容易出现相互干扰,进而降低穿梭车的任务执行效率。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种自动化生产过程中的穿梭车调度方法及装置,以至少解决相关技术中自动化生产过程中用于立体库的穿梭车在工作时容易出现相互干扰的技术问题。
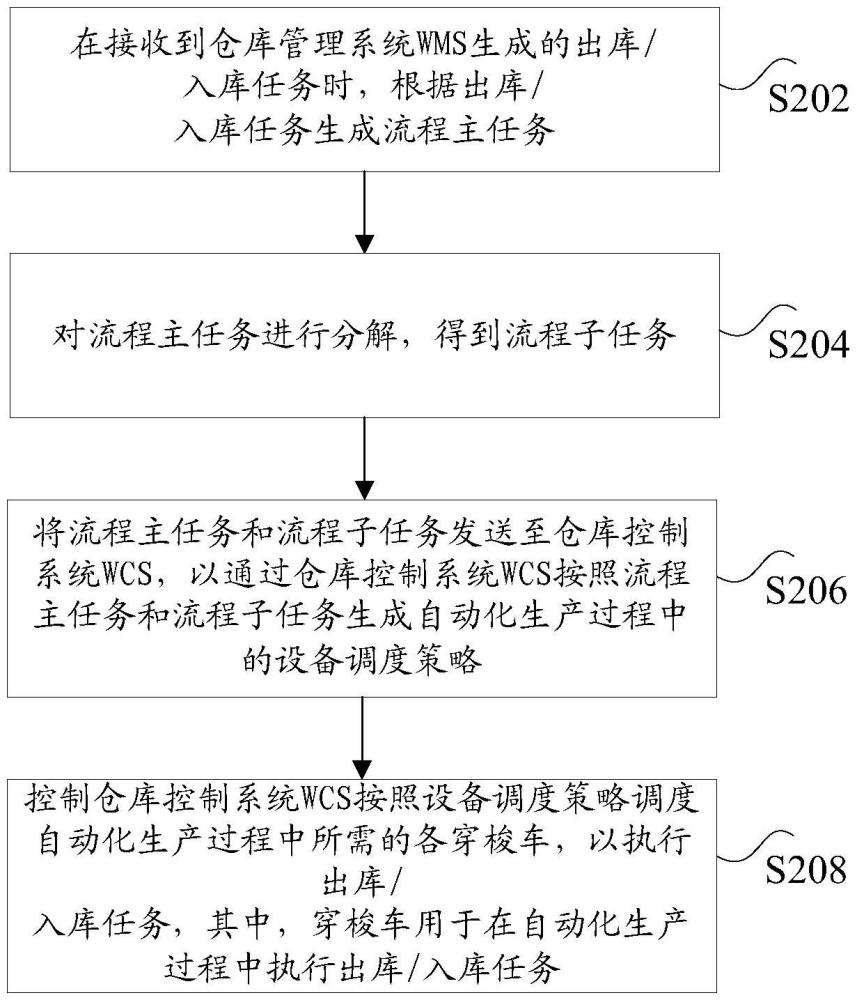
2、根据本发明实施例的一个方面,提供了一种自动化生产过程中的穿梭车调度方法,包括:在接收到仓库管理系统wms生成的出库/入库任务时,根据所述出库/入库任务生成流程主任务;对所述流程主任务进行分解,得到流程子任务;将所述流程主任务和所述流程子任务发送至仓库控制系统wcs,以通过所述仓库控制系统wcs按照所述流程主任务和所述流程子任务生成自动化生产过程中的设备调度策略;控制所述仓库控制系统wcs按照所述设备调度策略调度所述自动化生产过程中所需的各穿梭车,以执行所述出库/入库任务,其中,所述穿梭车用于在所述自动化生产过程中执行所述出库/入库任务。
3、可选地,在根据所述出库/入库任务生成流程主任务之前,该自动化生产过程中的穿梭车调度方法还包括:在数据库中创建库位表、流程任务表以及设备任务表,其中,所述库位表用于记录所述自动化生产过程中的库位信息和物料信息,所述流程任务表用于记录所述流程主任务和所述流程子任务,所述设备任务表用于记录各所述穿梭车和所述自动化生产中的生产设备的任务信息。
4、可选地,所述库位表的字段至少包括:序号、巷道名称、行、列、层、深度、是否锁定库位以及物料编码,所述流程任务表的字段至少包括:序号、任务号、巷道、起始行、起始列、起始层、起始深度、去向点位、去向行、去向列、去向层、去向深度、任务类型、任务状态、物料批次、订单号、料箱号、数量、任务开始时间以及任务结束时间,所述设备任务表的字段至少包括:序号、流程任务号、设备任务号、巷道、起始行、起始列、起始层、起始深度、去向点位、去向行、去向列、去向层、去向深度、任务类型、任务状态、料箱号、任务开始时间以及任务结束时间。
5、可选地,将所述流程主任务和所述流程子任务发送至仓库控制系统wcs,以通过所述仓库控制系统wcs按照所述流程主任务和所述流程子任务生成自动化生产过程中的设备调度策略,包括:在通过所述流程主任务和所述流程子任务确定有新物料需要入库时,查询所述库位表以确定立体库中是否存在有与所述新物料类型相同的物料,其中,所述立体库用于存储所述自动化生产过程中所需的物料;在查询结果表示所述立体库中存储有与所述新物料类型相同的物料时,检查与所述新物料类型相同的物料当前所在的存储层的深度是否已满;在检查结果表示所述存储层的深度未满时,确定所述设备调度策略为:通过控制所述新物料所在穿梭车行驶至所述存储层已将所述新物料存储至所述存储层;在所述检查结果表示所述存储层的深度已满时,确定所述设备调度策略为:查找与所述存储层是否为可扩展深度或查找新的库位以存储所述新物料。
6、可选地,将所述流程主任务和所述流程子任务发送至仓库控制系统wcs,以通过所述仓库控制系统wcs按照所述流程主任务和所述流程子任务生成自动化生产过程中的设备调度策略,包括:在查询结果表示所述立体库中没有存储与所述新物料类型相同的物料时,获取所述新物料的物料特性和所述立体库的布局信息;根据所述物料特性和所述布局信息在所述立体库中查找目标库位;将所述新物料存储至所述目标库位的最大深度处。
7、可选地,将所述流程主任务和所述流程子任务发送至仓库控制系统wcs,以通过所述仓库控制系统wcs按照所述流程主任务和所述流程子任务生成自动化生产过程中的设备调度策略,包括:在通过所述流程主任务和所述流程子任务确定有物料出库时,获取待出库物料的存放时间;根据所述存放时间对所述待出库物料进行排序,得到排序结果;根据所述排序结果调用所述穿梭车优先将所述待出库物料中所述存放时间超过存放时间阈值的所述待出库物料出库。
8、可选地,将所述流程主任务和所述流程子任务发送至仓库控制系统wcs,以通过所述仓库控制系统wcs按照所述流程主任务和所述流程子任务生成自动化生产过程中的设备调度策略,包括:在通过所述流程主任务和所述流程子任务确定有物料出库时,获取待出库物料的库位号;在根据所述库位号确定所述待出库物料位于同一库位时,按照所述待出库物料中深度大小从小到大依次对所述待出库物料进行出库。
9、可选地,在控制所述仓库控制系统wcs按照所述设备调度策略调度所述自动化生产过程中所需的各穿梭车,以执行所述出库/入库任务之后,该自动化生产过程中的穿梭车调度方法还包括:更新所述库位表和所述设备任务表;将所述出库/入库任务从所述流程任务表中删除或在所述流程任务表中将所述出库/入库任务标记为已完成。
10、根据本发明实施例的另外一个方面,还提供了一种自动化生产过程中的穿梭车调度装置,包括:第一生成单元,用于在接收到仓库管理系统wms生成的出库/入库任务时,根据所述出库/入库任务生成流程主任务;分解单元,用于对所述流程主任务进行分解,得到流程子任务;第二生成单元,用于将流程主任务和流程子任务发送至仓库控制系统wcs,以通过仓库控制系统wcs按照流程主任务和流程子任务生成自动化生产过程中的设备调度策略;控制单元,用于控制所述仓库控制系统wcs按照所述设备调度策略调度所述自动化生产过程中所需的各穿梭车,以执行所述出库/入库任务,其中,所述穿梭车用于在所述自动化生产过程中执行所述出库/入库任务。
11、可选地,该自动化生产过程中的穿梭车调度装置还包括:创建单元,用于在根据所述出库/入库任务生成流程主任务之前,在数据库中创建库位表、流程任务表以及设备任务表,其中,所述库位表用于记录所述自动化生产过程中的库位信息和物料信息,所述流程任务表用于记录所述流程主任务和所述流程子任务,所述设备任务表用于记录各所述穿梭车和所述自动化生产中的生产设备的任务信息。
12、可选地,所述库位表的字段至少包括:序号、巷道名称、行、列、层、深度、是否锁定库位以及物料编码,所述流程任务表的字段至少包括:序号、任务号、巷道、起始行、起始列、起始层、起始深度、去向点位、去向行、去向列、去向层、去向深度、任务类型、任务状态、物料批次、订单号、料箱号、数量、任务开始时间以及任务结束时间,所述设备任务表的字段至少包括:序号、流程任务号、设备任务号、巷道、起始行、起始列、起始层、起始深度、去向点位、去向行、去向列、去向层、去向深度、任务类型、任务状态、料箱号、任务开始时间以及任务结束时间。
13、可选地,所述第二生成单元,包括:查询模块,用于在通过所述流程主任务和所述流程子任务确定有新物料需要入库时,查询所述库位表以确定立体库中是否存在有与所述新物料类型相同的物料,其中,所述立体库用于存储所述自动化生产过程中所需的物料;检查模块,用于在查询结果表示所述立体库中存储有与所述新物料类型相同的物料时,检查与所述新物料类型相同的物料当前所在的存储层的深度是否已满;第一确定模块,用于在检查结果表示所述存储层的深度未满时,确定所述设备调度策略为:通过控制所述新物料所在穿梭车行驶至所述存储层已将所述新物料存储至所述存储层;第二确定模块,用于在所述检查结果表示所述存储层的深度已满时,确定所述设备调度策略为:查找与所述存储层是否为可扩展深度或查找新的库位以存储所述新物料。
14、可选地,所述第二生成单元,包括:第一获取模块,用于在查询结果表示所述立体库中没有存储与所述新物料类型相同的物料时,获取所述新物料的物料特性和所述立体库的布局信息;查找模块,用于根据所述物料特性和所述布局信息在所述立体库中查找目标库位;存储模块,用于将所述新物料存储至所述目标库位的最大深度处。
15、可选地,所述第二生成单元,包括:第二获取模块,用于在通过所述流程主任务和所述流程子任务确定有物料出库时,获取待出库物料的存放时间;排序模块,用于根据所述存放时间对所述待出库物料进行排序,得到排序结果;调用模块,用于根据所述排序结果调用所述穿梭车优先将所述待出库物料中所述存放时间超过存放时间阈值的所述待出库物料出库。
16、可选地,所述第二生成单元,包括:第三获取模块,用于在通过所述流程主任务和所述流程子任务确定有物料出库时,获取待出库物料的库位号;出库模块,用于在根据所述库位号确定所述待出库物料位于同一库位时,按照所述待出库物料中深度大小从小到大依次对所述待出库物料进行出库。
17、可选地,该自动化生产过程中的穿梭车调度装置还包括:更新单元,用于在控制所述仓库控制系统wcs按照所述设备调度策略调度所述自动化生产过程中所需的各穿梭车,以执行所述出库/入库任务之后,更新所述库位表和所述设备任务表;处理单元,用于将所述出库/入库任务从所述流程任务表中删除或在所述流程任务表中将所述出库/入库任务标记为已完成。
18、根据本发明实施例的另外一个方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,所述程序执行上述中任意一项所述的自动化生产过程中的穿梭车调度方法。
19、根据本发明实施例的另外一个方面,还提供了一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行上述中任意一项所述的自动化生产过程中的穿梭车调度方法。
20、根据本发明实施例的另外一个方面,还提供了一种计算机程序产品,包括计算机指令,所述计算机指令被处理器执行时执行上述中任意一项所述的自动化生产过程中的穿梭车调度方法。
21、在本发明实施例中,在接收到仓库管理系统wms生成的出库/入库任务时,根据出库/入库任务生成流程主任务;对流程主任务进行分解,得到流程子任务;将流程主任务和流程子任务发送至仓库控制系统wcs,以通过仓库控制系统wcs按照流程主任务和流程子任务生成自动化生产过程中的设备调度策略;控制仓库控制系统wcs按照设备调度策略调度自动化生产过程中所需的各穿梭车,以执行出库/入库任务,其中,穿梭车用于在自动化生产过程中执行出库/入库任务。通过本发明提供的上述技术方案,实现了通过调度算法,减少穿梭车在不同层之间的频繁换层的目的,降低了换层带来的时间成本,也能够防止车辆换层任务相互干扰的缺陷,确保任务层有车可用,提高了立体库的存储密度和整体作业效率,进而解决了相关技术中自动化生产过程中用于立体库的穿梭车在工作时容易出现相互干扰的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!