泊车结束时机确定方法、装置和车辆与流程
本技术涉及车辆,特别涉及一种泊车结束时机确定方法、装置和车辆。
背景技术:
1、随着科技的发展,车辆中所设计的功能也越来越多,为驾驶员提供了很大的便利。比如,自动泊车功能,具体是用户在想要停车时,通过开启自动泊车功能,后续可以自动搜索车辆周围的停车位并进行泊车路径规划,后续通过自动转向按照规划好的路径实现将车辆泊入车位中。
2、但是,如果停车位内存在停车限位器,由于停车限位器较小,通常安装在地面上,车辆的雷达可能会识别不到停车限位器的存在。因此,会导致在泊车时车辆直接撞击停车限位器并继续行驶以压过停车限位器继续进行泊车,从而导致用户的乘车体验不佳。
技术实现思路
1、本技术提供了一种泊车结束时机确定方法、装置、车辆和存储介质,可以确定在车辆撞上停车限位器时结束自动泊车,从而提高用户的乘车体验。技术方案如下:
2、第一方面,提供了一种泊车结束时机确定方法,所述方法包括:
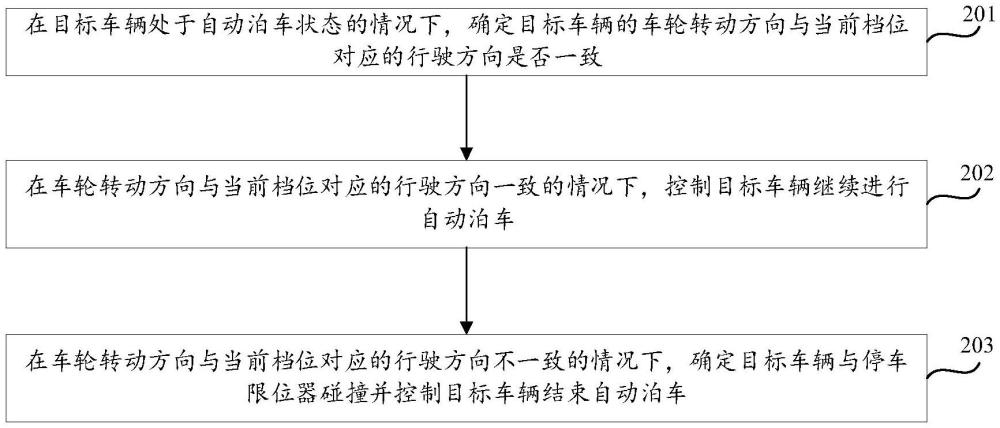
3、在目标车辆处于自动泊车状态的情况下,确定所述目标车辆的车轮转动方向与当前档位对应的行驶方向是否一致;
4、在所述车轮转动方向与所述当前档位对应的行驶方向一致的情况下,控制所述目标车辆继续进行自动泊车;
5、在所述车轮转动方向与所述当前档位对应的行驶方向不一致的情况下,确定所述目标车辆与停车限位器碰撞并控制所述目标车辆结束自动泊车。
6、在本技术中,在目标车辆处于自动泊车状态的情况下,先确定目标车辆的车轮转动方向与当前档位对应的行驶方向是否一致。后续在车轮转动方向与当前档位对应的行驶方向一致的情况下,控制目标车辆继续进行自动泊车;在车轮转动方向与当前档位对应的行驶方向不一致的情况下,确定目标车辆与停车限位器碰撞并控制目标车辆结束自动泊车。由于目标车辆与停车限位器发生碰撞时,可能会导致目标车辆突然向与当前档位对应的行驶方向相反的方向行驶,这会使得目标车辆的车轮转动方向与当前档位对应的行驶方向不一致。因此,通过比较车轮转动方向与当前档位对应的行驶方向,可以准确确定出目标车辆是否与停车限位器发生碰撞。从而后续可以及时控制目标车辆结束自动泊车,进而可以提升用户的乘车体验。
7、可选地,所述在目标车辆处于自动泊车状态的情况下,确定所述目标车辆的车轮转动方向与当前档位对应的行驶方向是否一致,包括:
8、在所述目标车辆处于自动泊车状态的情况下,确定所述目标车辆驶入目标车位的面积,所述目标车位为被选中进行自动泊车的车位;
9、在所述目标车辆驶入所述目标车位的面积大于预设面积阈值的情况下,确定所述车轮转动方向与所述当前档位对应的行驶方向是否一致。
10、可选地,所述确定所述目标车辆的车轮转动方向与当前档位对应的行驶方向是否一致,包括:
11、在所述目标车辆的四个车轮中存在至少一个车轮的车轮转动方向与所述当前档位对应的行驶方向相反的情况下,确定所述车轮转动方向与所述当前档位对应的行驶方向不一致;
12、在所述目标车辆的四个车轮的车轮转动方向均与所述当前档位对应的行驶方向相同的情况下,确定所述车轮转动方向与所述当前档位对应的行驶方向一致。
13、可选地,所述在所述车轮转动方向与所述当前档位对应的行驶方向不一致的情况下,确定所述目标车辆与停车限位器碰撞,包括:
14、在所述车轮转动方向与所述当前档位对应的行驶方向不一致的情况下,基于所述目标车辆的周围环境中普通障碍物的位置信息,确定所述目标车辆与所述普通障碍物是否发生碰撞,所述普通障碍物为目标车辆可以碾压的障碍物;
15、在所述目标车辆与所述普通障碍物未发生碰撞的情况下,确定所述目标车辆与所述停车限位器碰撞。
16、可选地,所述普通障碍物的位置信息包括所述普通障碍物的位置坐标,所述基于所述目标车辆周围环境中的普通障碍物的位置信息,确定所述目标车辆与所述普通障碍物是否发生碰撞,包括:
17、确定所述目标车辆的边界的位置坐标所形成的目标区域;
18、在所述普通障碍物的位置坐标位于所述目标区域上时,确定所述目标车辆与所述普通障碍物发生碰撞;
19、在所述普通障碍物的位置坐标位于所述目标区域之外时,确定所述目标车辆与所述普通障碍物未发生碰撞。
20、可选地,所述在所述目标车辆与所述普通障碍物未发生碰撞的情况下,确定所述目标车辆与所述停车限位器碰撞,包括:
21、在所述目标车辆与所述普通障碍物未发生碰撞的情况下,采集所述目标车辆周围的图像;
22、基于所述目标车辆周围的图像,确定是否识别到所述停车限位器;
23、在未识别到所述停车限位器的情况下,确定所述目标车辆与所述停车限位器碰撞;
24、在识别到所述停车限位器的情况下,确定所述停车限位器是否处于参考车位,所述参考车位为除目标车位之外的车位;
25、在所述停车限位器未处于所述参考车位的情况下,确定所述目标车辆与所述停车限位器碰撞。
26、可选地,所述方法还包括:
27、在未识别到所述停车限位器的情况下,显示泊车确认界面,所述泊车确认界面用于提醒驾驶员确认是否结束泊车;
28、响应于所述泊车确认界面上的确认泊车操作,控制所述目标车辆继续自动泊车,或者响应于所述泊车确认界面上的结束泊车操作,控制所述目标车辆结束自动泊车。
29、可选地,所述在所述车轮转动方向与所述当前档位对应的行驶方向不一致的情况下,确定所述目标车辆与停车限位器碰撞并控制所述目标车辆结束自动泊车之后,还包括:
30、确定所述目标车辆驶入目标车位的面积;
31、在所述目标车辆驶入所述目标车位的面积与所述目标车辆的面积不相同的情况下,记录所述停车限位器的位置坐标;
32、基于所述目标车辆的位置坐标、所述停车限位器的位置坐标、所述目标车位的边界位置坐标,重新规划泊车轨迹,得到新的泊车轨迹。
33、第二方面,提供了一种泊车结束时机确定装置,所述装置包括:
34、第一确定模块,用于在目标车辆处于自动泊车状态的情况下,确定所述目标车辆的车轮转动方向与当前档位对应的行驶方向是否一致;
35、第一控制模块,用于在所述车轮转动方向与所述当前档位对应的行驶方向一致的情况下,控制所述目标车辆继续进行自动泊车;
36、第二控制模块,用于在所述车轮转动方向与所述当前档位对应的行驶方向不一致的情况下,确定所述目标车辆与停车限位器碰撞并控制所述目标车辆结束自动泊车。
37、可选地,所述第一确定模块用于:
38、在所述目标车辆处于自动泊车状态的情况下,确定所述目标车辆驶入目标车位的面积,所述目标车位为被选中进行自动泊车的车位;
39、在所述目标车辆驶入所述目标车位的面积大于预设面积阈值的情况下,确定所述车轮转动方向与所述当前档位对应的行驶方向是否一致。
40、可选地,所述第一确定模块用于:
41、在所述目标车辆的四个车轮中存在至少一个车轮的车轮转动方向与所述当前档位对应的行驶方向相反的情况下,确定所述车轮转动方向与所述当前档位对应的行驶方向不一致;
42、在所述目标车辆的四个车轮的车轮转动方向均与所述当前档位对应的行驶方向相同的情况下,确定所述车轮转动方向与所述当前档位对应的行驶方向一致。
43、可选地,所述第二控制模块用于:
44、在所述车轮转动方向与所述当前档位对应的行驶方向不一致的情况下,基于所述目标车辆的周围环境中普通障碍物的位置信息,确定所述目标车辆与所述普通障碍物是否发生碰撞,所述普通障碍物为目标车辆可以碾压的障碍物;
45、在所述目标车辆与所述普通障碍物未发生碰撞的情况下,确定所述目标车辆与所述停车限位器碰撞。
46、可选地,所述第二控制模块用于:
47、确定所述目标车辆的边界的位置坐标所形成的目标区域;
48、在所述普通障碍物的位置坐标位于所述目标区域上时,确定所述目标车辆与所述普通障碍物发生碰撞;
49、在所述普通障碍物的位置坐标位于所述目标区域之外时,确定所述目标车辆与所述普通障碍物未发生碰撞。
50、可选地,所述第二控制模块用于:
51、在所述目标车辆与所述普通障碍物未发生碰撞的情况下,采集所述目标车辆周围的图像;
52、基于所述目标车辆周围的图像,确定是否识别到所述停车限位器;
53、在未识别到所述停车限位器的情况下,确定所述目标车辆与所述停车限位器碰撞;
54、在识别到所述停车限位器的情况下,确定所述停车限位器是否处于参考车位,所述参考车位为除目标车位之外的车位;
55、在所述停车限位器未处于所述参考车位的情况下,确定所述目标车辆与所述停车限位器碰撞。
56、可选地,所述装置还包括:
57、显示模块,用于在未识别到所述停车限位器的情况下,显示泊车确认界面,所述泊车确认界面用于提醒驾驶员确认是否结束泊车;
58、第三控制模块,用于响应于所述泊车确认界面上的确认泊车操作,控制所述目标车辆继续自动泊车,或者响应于所述泊车确认界面上的结束泊车操作,控制所述目标车辆结束自动泊车。
59、可选地,所述装置还包括:
60、第二确定模块,用于确定所述目标车辆驶入目标车位的面积;
61、记录模块,用于在所述目标车辆驶入所述目标车位的面积与所述目标车辆的面积不相同的情况下,记录所述停车限位器的位置坐标;
62、泊车轨迹规划模块,用于基于所述目标车辆的位置坐标、所述停车限位器的位置坐标、所述目标车位的边界位置坐标,重新规划泊车轨迹,得到新的泊车轨迹。
63、第三方面,提供了一种车辆,所述车辆包括:
64、存储器,用于存储可执行程序代码;
65、处理器,用于从所述存储器中调用并运行所述可执行程序代码,使得所述车辆执行上述的泊车结束时机确定方法。
66、第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的泊车结束时机确定方法。
67、第五方面,提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述的泊车结束时机确定方法的步骤。
68、可以理解的是,上述第二方面、第三方面、第四方面、第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!