车辆的具有电子气动冗余部的电子控制式气动行车制动系统的利记博彩app
本发明涉及一种根据权利要求1的前序部分所述的车辆的电子控制式气动行车制动系统。
背景技术:
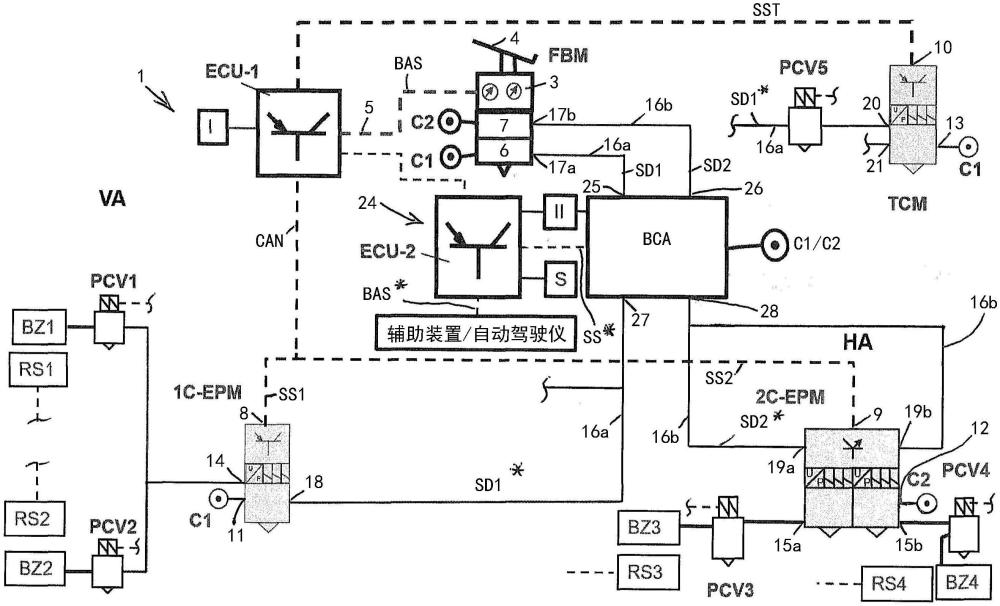
1、由ep 3 344 503 b1已知这样的电子控制式气动行车制动系统。在已知的行车制动系统中,存在有呈具有一个电通道和两个气动通道的脚制动阀的形式的第一制动阀和呈双通道压力调节模块的形式的第二制动阀。根据对第一制动阀的脚制动踏板的操纵,该第一制动阀在其两个气动通道中产生用于前轴上的第一控制阀的和用于后轴上的第二控制阀的第一制动阀控制压力。并行地,在冗余部的意义上,通过第二制动阀在其两个通道中产生用于前轴上的第一控制阀的和用于后轴上的第二控制阀的第二制动阀控制压力。在此,要么将第一制动阀控制压力与第二制动阀控制压力之间的相应较大的控制压力、要么将由两个制动阀控制压力组成的和输出给第一控制阀和第二控制阀。虽然,通过所提到的构造提供电的和气动的冗余部,但是由于每个制动回路的用于第一和第二制动阀控制压力的双重的布管或者双重的气动线路,该构造花费和装配花费相对较大。
技术实现思路
1、相比之下,本发明基于如下任务:这样扩展电子控制式气动行车制动系统,使得在控制可能性方面的大的可变性的同时产生较低的构造花费和装配花费。
2、根据本发明,该任务通过权利要求1的特征解决。
3、本发明从一种车辆的电子控制式气动行车制动系统出发,该行车制动系统至少具有以下装置:
4、a)第一电子控制装置;
5、b)至少一个制动回路,所述至少一个制动回路具有至少一个控制阀,其中,所述控制阀构造为用于在所述至少一个制动回路中设定或者调节用于至少一个行车制动促动器的制动压力,其中,
6、c)至少一个控制阀具有至少一个电控制输入端和至少一个气动控制输入端以及气动工作输出端,所述电控制输入端用于接收初级电控制信号,所述气动控制输入端用于接收气动控制压力,和
7、d)至少一个电子气动控制阀根据初级电控制信号或者根据次级气动控制压力经由气动工作输出端给至少一个行车制动促动器供给制动压力,并且其中,
8、e)第一电子控制装置构造为用于,根据初级电制动要求信号产生初级电控制信号并且将该初级电控制信号控制输入到至少一个控制阀的电控制输入端中;
9、f)制动要求信号产生器件,所述制动要求信号产生器件具有至少一个电输出端和至少一个气动输出端,所述制动要求信号产生器件构造为用于,根据车辆目标减速度在至少一个电输出端上产生初级电制动要求信号并且将该初级电制动要求信号控制输入到第一电子控制装置中,并且在至少一个气动输出端上产生至少一个初级气动控制压力,
10、g)至少一个气动连接部,所述气动连接部架设在制动要求信号产生器件(fbm)的至少一个气动输出端与至少一个电子气动控制阀的气动控制输入端之间。
11、然后,本发明设置,
12、h)在气动连接部中布置有电子控制式电子气动部件,所述电子控制式电子气动部件具有至少一个控制压力输入端和至少一个控制压力输出端,所述控制压力输入端用于控制输入初级气动控制压力,所述控制压力输出端用于控制输出次级气动控制压力,所述次级气动控制压力被控制输入到至少一个电子气动控制阀的气动控制输入端中,其中,
13、i)所述电子控制式电子气动部件这样构造,使得所述电子控制式电子气动部件
14、i1)仅根据初级气动控制压力,或者
15、i2)仅根据次级电控制信号,或者
16、i3)不仅根据初级气动控制压力、还根据次级电控制信号,
17、产生、调制或者形成次级气动控制压力。
18、电子控制式电子气动部件应理解为如下部件:所述部件能够通过电子装置控制和/或调节,并且所述部件包括气动部件和/或电子气动部件,例如包括电磁阀并且可选地也包括中继阀。控制电子装置也可以集成在所述电子控制式电子气动部件中或者包括在所述电子控制式电子气动部件中。
19、例如,可以通过下述方式(仅仅或者不仅)根据初级气动控制压力产生或者形成次级气动控制压力:通过所述电子控制式电子气动部件测量该初级气动控制压力,并且基于用于该初级气动控制压力的测量值随后由所述电子控制式电子气动部件形成或者产生次级气动控制压力。在此,初级气动控制压力和次级气动控制压力可以彼此气动分离。
20、如果次级气动控制压力与初级气动控制压力无关地且仅基于次级电控制信号产生或者形成,则这可以意味着,虽然产生初级气动控制压力,但是在形成或者产生次级气动控制压力时,所述电子控制式电子气动部件忽略或者不考虑该初级气动控制压力。因此,虽然初级气动控制压力根据车辆的驾驶员例如经由制动踏板预给定的目标车辆减速度而产生,但是在这种情况下不考虑驾驶员期望。例如,当在电动车辆中应进行再生时或者应使用缓行器而非摩擦制动器时,这可以是有意义的。这主要是在长的下坡行驶的情况下是有利的,以便不使摩擦制动器过热。
21、但是,替代地,可能完全没有产生初级气动控制压力,例如因为由于在气动备用制动回路中的干扰而阻碍初级气动控制压力的产生,但是然后仍然由所述电子控制式电子气动部件基于次级电控制信号产生或者形成次级气动控制压力。在这种情况下,通过所述电子控制式电子气动部件提供用于气动备用制动回路的电子气动冗余部。
22、当驾驶员注意力不集中并且尽管由于危急状况需要制动但是未进行制动时,同样没有产生初级气动控制压力。然后,例如由驾驶员辅助系统、例如acc(adaptive cruisecontrol,自适应巡航控制)或者由自动驾驶仪装置发起的次级电控制信号确保次级气动控制压力的产生和/或调制。
23、虽然驾驶员通过操纵脚制动模块的脚制动踏板请求以与驾驶员的制动期望有关的目标车辆减速度进行制动,但是与此并行地仍然也可以由驾驶员辅助系统预给定与此相比更高的目标车辆减速度或者更低的目标车辆减速度。在此,由紧急制动辅助装置产生的紧急制动减速度尤其可以大于由驾驶员请求的目标车辆减速度。在这种情况下,可以仅根据第二电子控制装置的次级电控制信号产生次级气动控制压力,该次级电控制信号基于由紧急制动辅助装置预给定的目标车辆减速度。
24、除此之外,能够考虑如下情况:在所述情况中,仅根据第二电子控制装置的次级电控制信号并且还根据初级气动控制压力形成、调制和产生次级气动控制压力。例如,当首要的电子气动控制装置失效并且驾驶员借助次要的气动控制装置触发具有大于允许的制动滑移率的制动滑移率的制动时。然后,通过次级电控制信号这样调制次级气动控制压力,使得制动滑移率不大于允许的制动滑移率。这类似地也适用于另外的驾驶员辅助系统,例如驱动滑移率调节装置或者稳定性调节装置,所述稳定性调节装置可以影响次级气动控制压力的调制和/或产生。
25、当通过初级电控制信号对至少一个控制阀的电操控受到阻碍时,或者当不意图产生初级电控制信号时,所述电子控制式电子气动部件也构成电子气动冗余部。
26、在本发明中,制动要求信号产生器件、电子控制式电子气动部件和至少一个电子气动控制阀在气动连接部中串联连接。因此,例如对于每个制动回路,有利地每个制动回路只需要一个气动线路作为气动连接部,该气动线路然后形成所述气动连接部。
27、在本发明中清楚的是,对于每个制动回路,可以单独地产生自己的初级气动控制压力和次级气动控制压力以及自己的初级电控制信号和次级电控制信号。
28、在从属权利要求中能够实现在权利要求1中说明的本发明的有利的扩展方案。
29、特别优选地,所述电子控制式电子气动部件这样构造,使得所述电子控制式电子气动部件可以接收
30、a)驾驶员辅助系统的信号,和/或
31、b)自动驾驶仪装置的信号,和/或
32、c)传感器装置的信号,
33、并且可以根据所述信号产生次级电控制信号。
34、借助该次级电控制信号,可以调制次级气动控制压力。
35、优选地,该传感器装置包括下述传感器中的至少一个传感器:车轮转速传感器、转向角度传感器、偏航率传感器、加速度传感器。
36、例如,该传感器装置可以包括至少一个车轮转速传感器,该车轮转速传感器检测车辆的至少一个车轮的车轮转速信号。这些车轮转速信号形成用于制动滑移率控制装置(abs)、驱动滑移率控制装置(asr)和稳定性调节系统(esp)的基础,所述滑移率控制装置、所述驱动滑移率控制装置或者所述稳定性调节系统例如集成在电子控制式电子气动部件中或者在电子控制式电子气动部件中实施,或者电子控制式电子气动部件与所述滑移率控制装置、所述驱动滑移率控制装置或者所述稳定性调节系统共同作用。同样地,在传感器装置中可以包含有转动速率传感器、转向角度传感器和/或加速度传感器(纵向加速度和横向加速度),以便例如实现稳定性调节系统(esp)。
37、因此,在电子控制式电子气动部件中,可以实施制动滑移率调节(abs)、驱动滑移率调节(asr)和/或稳定性调节或行驶动力学调节(esp),根据所述制动滑移率调节、驱动滑移率调节和/或稳定性调节或行驶动力学调节,产生次级电控制信号。然后,尤其是当至少一个控制电子装置或者调节电子装置形成电子控制式电子气动部件的组成部分时,根据次级电控制信号调制次级气动控制压力,在该电子控制式电子气动部件中,实施制动滑移率调节(abs)、驱动滑移率调节(asr)和/或稳定性调节或行驶动力学调节(esp)。
38、因此,例如通过根据这样的传感器的信号调制一个次级气动控制压力或者多个次级控制压力,电子控制式电子气动部件能够为每个车辆车轮或者每个车轴分别执行制动滑移率调节(abs)和/或驱动滑移率调节(asr)和/或在车辆中执行稳定性调节或行驶动力学调节(esp)。
39、驾驶员辅助系统可以包括例如紧急制动辅助装置或者适配速度调节装置(acc,adaptive cruise control,自适应巡航控制),然后,通过该适配速度调节装置例如预给定目标车辆减速度作为信号,该信号然后由所述电子控制式电子气动部件接收,以便根据该信号调制次级气动控制压力。驾驶员辅助系统的控制电子装置也可以已经集成在所述电子控制式电子气动部件中。
40、例如,所述电子控制式电子气动部件可以附接到车辆数据总线上,在该数据总线上能够提供所述信号。
41、在至少一个电子气动控制阀的工作输出端与至少一个制动促动器之间也可以连接有abs压力控制阀,由至少一个电子气动控制阀给该制动促动器供给制动压力,所述abs压力控制阀由电子控制式电子气动部件控制,以便车轮单独地或者轴单独地调制制动压力。通过abs压力控制阀可以以已知的方式暂时地保持、升高或者降低制动压力。然后,在车辆的布置有这样的abs压力控制阀的车轮或者轴上,可以车轮单独地或者轴单独地调制制动压力。
42、对压力的调制应理解为所涉及的压力的任意的改变、匹配或者变化,其中也可以包括压力保持。
43、制动要求信号产生器件也可以包括脚制动模块,所述脚制动模块具有至少一个电通道和至少一个气动通道,其中,根据对脚制动模块的脚制动踏板的操纵,在至少一个电通道中产生初级制动要求信号,并且在至少一个气动通道中产生至少一个初级气动控制压力。替代地或者附加地,如下制动要求信号产生器件也被考虑用作制动要求信号产生器件:所述制动要求信号产生器件在没有驾驶员的作用的情况下例如自动地产生初级制动要求信号和至少一个初级气动控制压力,所述制动要求信号产生器件尤其是在自主驾驶的范畴中的自动驾驶仪装置。
44、特别优选地,电子控制式电子气动部件包括电磁控制阀装置,该电磁控制阀装置能够通过次级电控制信号控制,其中,由电磁控制阀装置根据次级电控制信号产生次级气动控制压力。
45、电子控制式电子气动部件也可以包括第二电子控制装置以及至少一个压力传感器,该压力传感器检测初级气动控制压力并且将相应的压力信号控制输入到第二电子控制装置中,该第二电子控制装置根据压力信号产生次级电控制信号。
46、在此,第二电子控制装置可以是集成的第二电子控制装置或者但也可以分布到多个第二电子控制装置上。优选地,次级电控制信号与次级电制动要求信号有关,该次级电制动要求信号代表车辆目标减速度或者压力目标值。
47、次级电制动要求信号可以由驾驶员辅助系统或者由自动驾驶仪装置产生,该驾驶员辅助系统例如是紧急制动辅助装置、适配速度调节装置(acc,adaptive cruisecontrol,自适应巡航控制)。
48、完全特别优选地,行车制动系统可以包括至少一个压力调节模块,该压力调节模块至少包括以下装置:
49、a)至少一个压力调节模块储备附接端,所述压力调节模块储备附接端用于与处在储备压力下的压缩空气储备器连接,
50、b)至少一个电压力调节模块控制输入端、至少一个气动压力调节模块控制输入端、至少一个压力调节模块放气输出端和至少一个压力调节模块工作输出端,所述压力调节模块放气输出端与压降部连接,
51、c)至少一个电子控制器,所述电子控制器与电压力调节模块控制输入端电连接,
52、d)至少一个电磁进气/排气阀组合,所述电磁进气/排气阀组合由电子控制器控制,所述电磁进气/排气阀组合一方面与压力调节模块储备附接端连接用于供给储备压力,另一方面与压力调节模块放气输出端连接用于放气,
53、e)中继阀,所述中继阀由电磁进气/排气阀组合通过中继阀的气动控制附接端上的气动中继阀控制压力来控制,所述中继阀根据中继阀控制压力从储备压力出发在压力调节模块工作输出端上调制工作压力,
54、f)至少一个压力传感器,所述压力传感器检测压力调节模块工作输出端上的工作压力并且将相应的实际压力值控制输入到电子控制器中,
55、g)电磁备用阀,所述电磁备用阀一方面附接到气动压力调节模块控制输入端上并且另一方面附接到中继阀的气动控制附接端上,并且所述电磁备用阀在通电的情况下在截止位态中将气动压力调节模块控制输入端相对于中继阀的气动控制附接端截止,并且在未通电的情况下在导通位态中将气动压力调节模块控制输入端与中继阀的气动控制附接端连接,其中,
56、h)电子控制器构造为使得该电子控制器这样操控电磁进气/排气阀组合,使得实际压力值被调节到目标压力值,该目标压力值由能够被控制输入到电压力调节模块控制输入端中的电信号来代表。
57、电子控制式电子气动部件优选包括电子气动控制阀装置,该电子气动控制阀装置可以包括至少一个压力调节模块,在所述压力调节模块中,
58、a)所述气动压力调节模块控制输入端形成控制压力输入端,用于控制输入初级气动控制压力,并且
59、b)压力调节模块工作输出端形成控制压力输出端,用于控制输出次级气动控制压力,
60、c)压力调节模块储备附接端附接到至少一个压缩空气储备器上,并且
61、d)次级电控制信号能够被控制输入到电压力调节模块控制输入端中。
62、电子气动控制阀装置也可以构造为使得,当尤其是第二电子控制装置没有产生次级电控制信号时,即当不期望电子气动控制或者电子气动控制受到阻碍时,电磁备用阀切换到导通位态中,其中,然后中继阀根据初级气动控制压力在压力调节模块工作输出端上产生或者形成次级气动控制压力。由于电磁备用阀优选通过弹簧器件预张紧到其导通流位态中并且因此在未通电的情况下自动地切换到导通位态中,因此,能够通过简单的方式呈现该功能。另一方面,电磁备用阀在通电的情况下则克服弹簧器件的作用切换到其截止位态中,由此,初级气动控制压力不能够到达中继阀并且然后不能够发挥作用。
63、否则的话,当尤其是由第二电子装置产生次级电控制信号并且该次级电控制信号被控制输入到电子气动控制阀装置的电子控制器中时,然后被通电的电磁备用阀切换到截止位态中,由此,初级气动控制压力不能够到达中继阀并且然后不能够发挥作用。但是,然后电子气动控制阀装置的电子控制器根据次级电控制信号操控电磁进气/排气阀组合,以便通过中继阀在压力调节模块工作输出端上产生或者形成次级气动控制压力。
64、特别优选地,至少一个电磁控制阀可以包括压力调节模块,在该压力调节模块中,
65、a)所述气动压力调节模块控制输入端形成控制压力输入端,用于控制输入初级气动控制压力,并且
66、b)压力调节模块工作输出端形成工作输出端,用于控制输出用于至少一个行车制动促动器的制动压力,
67、c)压力调节模块储备附接端附接到至少一个压缩空气储备器上,
68、d)电压力调节模块控制输入端附接到第一电子控制装置上,用于控制输入初级电控制信号。
69、如前所述,当通过初级电控制信号对至少一个控制阀的电操控受到阻碍时,或者当不意图产生初级电控制信号时,电子控制式电子气动部件可以构成电子气动控制冗余部。
70、该行车制动系统可以尤其包括传统的具有制动压力调节装置(ebs)的电子调节式行车制动系统,该电子调节式行车制动系统(事后)由电子控制式电子气动部件补充,或者在该电子调节式行车制动系统中,电子控制式电子气动部件是加装部件。在此,加装花费有利地是低的。
71、电子控制式电子气动部件也可以构造为使得所述电子控制式电子气动部件产生用于控制车辆的驱动机的(尤其是用于实现驱动滑移率调节asr的)和/或用于控制缓行器的控制信号。
- 还没有人留言评论。精彩留言会获得点赞!