基于双凸轮槽运动合成的单自由度穴盘苗抓取装置
本发明属于农业机械,具体涉及一种基于双凸轮槽运动合成的单自由度穴盘苗抓取装置。
背景技术:
1、随着温室穴盘育苗技术的日渐成熟和规模的逐步扩大,幼苗移栽的效率与质量亟须提高,因此对移栽过程的机械化要求也日渐增长。而机械化移栽最重要的一环是穴盘苗的抓取转移,现有的取苗系统可分为气动控制系统驱动和机械传动控制两类,机械传动控制又包括凸轮驱动和齿轮连杆驱动等。气动系统控制较为复杂,能耗大,容易降低工作效率。机械传动控制中机械结构复杂,自由度高,可靠性低。对于取苗爪,现有的柔性机械爪较灵活但是体积大且控制复杂,不适用于移栽机,针式机械爪夹取方便可靠但是灵活性不高。对此,本发明重新设计了取苗爪,并辅之以特殊轨道设计的分距机构、凸轮槽机构和曲柄摇杆机构,设计了一种基于双凸轮槽运动合成的单自由度穴盘苗抓取机构,克服机械传动控制复杂且可靠性低的问题,通过单自由度机械结构实现取苗的全过程。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种基于双凸轮槽运动合成的单自由度穴盘苗抓取装置,用于完成物料抓取、分距、转移、释放、复位工作,并且其运行具有周期性;再者其自由度为一,达到便于控制和运行的目的,以适应于穴盘苗抓取的工作情景要求,完成工作任务。
2、本发明解决其技术问题所采用的技术方案是:
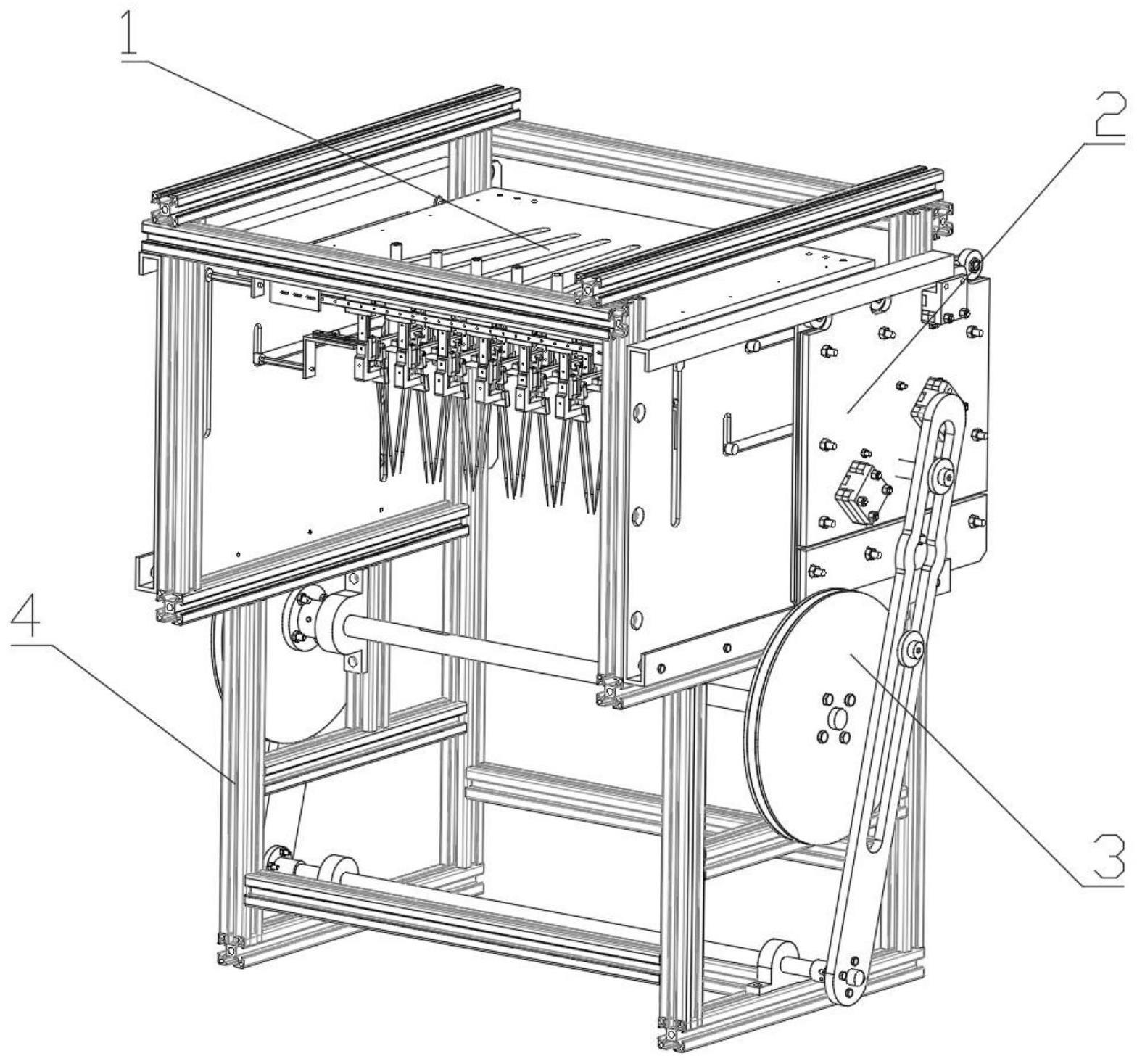
3、一种基于双凸轮槽运动合成的单自由度穴盘苗抓取装置,包括外框架,以及安装在外框架上的抓取分距机构、凸轮槽板轨迹控制机构和曲柄摇杆机构,所述的抓取分距机构在所述的凸轮槽板轨迹控制机构的控制,用于实现穴盘苗抓取、分距、转移、释放、复位工作;所述的曲柄摇杆机构与所述的凸轮槽板轨迹控制机构连接,用于动力的输入,并且因所述曲柄摇杆机构的运动周期性及其自由度为一,使得整个装置都具有周期性且自由度为一。
4、进一步,所述的抓取分距机构包括一个抓取机构和一个分距机构,所述的抓取机构包括若干个针式机械爪、一个上轨道和一个下轨道,所述的若干针式机械爪的u型外框通过其两侧的横向滑轨串联在所述的上轨道上,若干针式机械爪的腰型孔控制梁通过中间的横向滑轨串联在上述的下轨道上;所述的分距机构包括一块分距板、两根滑轨、四个连接件和四个随动器,所述抓取机构通过其上轨道上的两个滑块与所述分距机构分距板下的两根滑轨连接,通过改变抓取分距机构当中抓取机构与分距机构的横向相对位置来改变机械爪的间距达到分距功能。
5、再进一步,所述的针式机械爪包括一个u型外框、一个腰型槽控制梁和一对抓取针,所述的u型外框主体为一个u型件,其上边上侧具有圆柱形凸起,其俩边内侧具有纵向滑轨,俩边外侧具有横向的滑块,俩边的底端具有导向块,导向方向为向下与u型件中心轴线呈锐角;所述的腰型孔控制梁,其俩端部各有一个纵向的滑块,并且其左右末端附近都有一个腰型孔、中间有一个横向的滑轨;一对抓取针完全一致,都包括两根金属针、一根连接销钉和一个连接件,所述连接件下端开有两个安装孔,所述的两根金属针安装于此,两根金属针相互平行、端部平齐,所述连接件的侧面偏上端开有一个侧孔,所述连接销钉安装于此;所述的u型外框开口朝下,所述的腰型孔控制梁两端滑块与所述的u型外框俩边内侧滑轨连接,使得腰型孔控制梁可在u型外框内上下平移,所述的一对抓取针上端的连接销钉分别与所述腰型孔控制梁的左右腰型孔连接,形成平面高副,每个抓取针的两个金属针分别插入到所述导向块当中,进而,左右两个金属针的轴线就形成了一个底部开口的v字。
6、所述针式机械爪左右两个金属针的轴线形成的v字开口大小由所述金属针伸出所述导向块的长度决定,而此长度可由所述腰型孔控制梁上下平移来控制,即下移变小上移变大,而这种变化投影到抓取穴盘苗上就变为:v开口变小抓取穴盘苗、v开口变大释放穴盘苗,进而,整体上所述针式机械爪的腰型孔控制梁相对于u型外框下移,即可完成抓取穴盘苗动作;腰型孔控制梁相对于u型外框上移,即可完成释放穴盘苗动作。
7、所述的上轨道包括两根硬质滑轨、两块上轨道连接件、一对随动器和两个滑块,所述的两根硬质滑轨与所述的两块上轨道连接件固连成一个形为长方形的构件,所述的两根硬质滑轨作长方形长边,且轨道朝向长方形内侧,所述的俩块上轨道连接件作长方形短边;所述的上轨道连接件顶面有滑块安装孔,两个上轨道连接件顶面上都安装两个滑块;所述的上轨道连接件朝外侧的面上有随动器安装孔,两个上轨道连接件外侧面上都安装一个随动器,以上在安装时都要保证对称;
8、所述的下轨道包括一根硬质滑轨、两个下轨道连接件和一对随动器。所述的一对随动器通过所述的两个下轨道连接件分别连接在所述的硬质滑轨俩端。
9、本方案中,若干针式机械爪的u型框通过其两侧的横向滑轨串联在所述的上轨道上,若干针式机械爪的腰型孔控制梁通过中间的横向滑轨串联在上述的下轨道上,形成所述的抓取机构,进而其通过控制上轨道与下轨道的纵向相对位置即可一次性控制若干针式机械爪u型外框与腰型孔控制梁的纵向相对位置,即同时控制若干针式机械爪进行抓取与释放工作,并且针式机械爪与轨道之间可相对滑动,为后续分距做准备。
10、更进一步,所述的分距板为一块正方形长板,其表面开有与上述针式机械爪相同数量的直腰型孔,在分距板表面对称发散分布,即各个直腰型孔的两个末端半圆圆心分别等距分布在俩条平行直线上,且俩条直线上的圆心距不同;所述的两根滑轨固定在长方形分距板的底面两侧,且与上述直腰型孔的对称线平行;所述的四个随动器通过四个连接件分别固定在分距板的四个角上。
11、本方案中,将所述抓取机构通过其上轨道上的两个滑块与所述分距机构分距板下的两根滑轨连接,且在安装时注意将上述抓取机构中各个针式机械爪u型外框上的圆柱形凸起依次插入到分距机构分距板的各个直腰型孔中,形成所述的抓取分距机构。进而,即可通过改变抓取分距机构当中抓取机构与分距机构的横向相对位置来改变机械爪的间距,达到分距功能。
12、进一步,所述的抓取分距机构通过改变其内部抓取机构当中上、下轨道之间的纵向相对位置即可实现穴盘苗抓取、释放功能;通过改变其抓取机构与分距机构之间的横向相对位置,即可实现穴盘苗分距功能;而上述纵向、横向相对位置的改变恰恰实现了穴盘苗转移功能。此处需指出:上轨道、下轨道以及分距机构上都固连一对随动器,故改变上轨道与下轨道、抓取机构与分距机构之间相对位置,等价于改变其上随动器之间的相对位置即可,并且在此上轨道、下轨道以及分距机构上的随动器编号分别为a、b、c(同一机构上的随动器相对位置不改变,故名称一样),后续出现的如“改变a与b相对位置”等描述即为“改变上轨道与下轨道相对位置”。
13、再进一步,为了完整地实现穴盘苗抓取、分距、转移、释放、复位工作,需要对三个随动器进行运动路径规划。在此之前,假定取苗位低于放苗位。抓取分距机构的工作周期包括:扩大针式机械爪v口、整体下移靠近穴盘苗、缩小针式机械爪v口抓取穴盘苗、整体上移转移穴盘苗、抓取机构相对分距机构横向移动转移穴盘苗并且完成分距、扩大针式机械爪v口释放穴盘苗、缩小针式机械爪v口复位、抓取机构相对分距机构反向横向移动复位。故由上述工作周期得出三个随动器的运动路径为:ac下移、abc下移、b下移、abc上移、ab前移、b上移、b下移、ab后移(此处未提到的随动器静止不动)。由于上述机构的设计,a与c之间只能发生横向位移(只需要控制a/c其中一个上下移即可实现ac同时上下移),故完整地实现穴盘苗抓取、分距、转移、释放、复位工作,ab两个随动器的最终运动路径为:a下移、ab下移、b下移、ab上移、ab前移、b上移、b下移、ab后移(此处未提到的随动器静止不动),且其自由度为4(左右两侧各为2)。
14、所述的凸轮槽板轨迹控制机构,包括一块轨迹凸轮槽板与一块动力凸轮槽板。所述的轨迹凸轮槽板,其表面有两个凸轮槽a、b,其轴线分别为上述a、b两个随动器的运动轨迹;所述的动力凸轮槽板,其表面有两个凸轮槽a’、b’,分别对应上述轨迹凸轮槽板上的两个凸轮槽a、b,用于控制a、b两个随动器的运动;所述凸轮槽a’的轴线受制于a随动器的运动路径;所述凸轮槽b’的轴线受制于b随动器的运动路径;所述的轨迹凸轮槽板与所述的动力凸轮槽板贴合工作,构成所述的凸轮槽板轨迹控制机构。
15、本方案中,只需要使得所述凸轮槽板轨迹控制机构中动力凸轮槽板相对于轨迹凸轮槽板的作往复运动,即可控制两个随动器按:a下移、ab下移、b下移、ab上移、ab前移、b上移、b下移、ab后移(此处未提到的随动器静止不动)的节奏运动,将原先的4个自由度减少到现有的2个自由度,并且简化运动形式。
16、所述的曲柄摇杆机构,包括两根曲柄、两根摇杆和一根中间轴。所述的中间轴俩端与所述的两根曲柄末端固连,两根所述的曲柄以平面高副连接两根摇杆,构成曲柄摇杆机构;所述的两根摇杆的末端分别以平面高副连接上述的俩块动力凸轮槽板。
17、本方案中,在中间轴的带动下,两根曲柄带动两根摇杆作往复摇摆运动,此运动通过平面高副传递到动力凸轮槽板,进而带动动力凸轮槽板相对于轨迹凸轮槽板的作往复运动,将原先的2个自由度减少到现有的1个自由度,且将运动形式简化为最简单的转动。
18、所述的框架,包括若干的铝型材,用于将上述各个机构的固定限位。
19、与现有技术相比,本发明的有益效果表现在:1、本发明所涉及的穴盘苗抓取装置,自由度为1,实现的功能复杂而控制相当简单;2、本发明为凸轮槽控制,运动具有严格周期性,时序不会错乱,可用于高速精准的穴盘苗抓取工作;3、本发明抓取路径完全由凸轮槽控制,调整简单,可满足各种各样的抓取需求。
- 还没有人留言评论。精彩留言会获得点赞!