一种自抗扰无差拍的电流控制方法、装置、介质及设备
本发明涉及一种自抗扰无差拍的电流控制方法、装置、介质及设备,属于电机控制。
背景技术:
1、永磁同步电机由于其结构简单、功率密度高,已成为当前电机的最佳选择之一。
2、在永磁电机控制系统中,电流控制设计是控制系统的关键技术。
3、常见的电流控制方法有无差拍电流预测控制(deadbeat predictive currentcontrol,dpcc)。dpcc的具体内容是基于离散模型预测电压参考,使用空间矢量脉宽调制(space vector pulse width modulation,svpwm)转换相应的开关配置,可以在短时间间隔内高精度地控制电流。dpcc的优点在于只需一次计算就可以获得具有零电流误差的参考电压矢量,但dpcc的缺点在于对参数十分敏感,容易受到参数失配问题的影响,抗干扰能力较差。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种自抗扰无差拍的电流控制方法、装置、介质及设备,能够使永磁电机控制系统中的电流实际值等于电流给定值。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、一方面,本发明提供一种自抗扰无差拍的电流控制方法,包括:
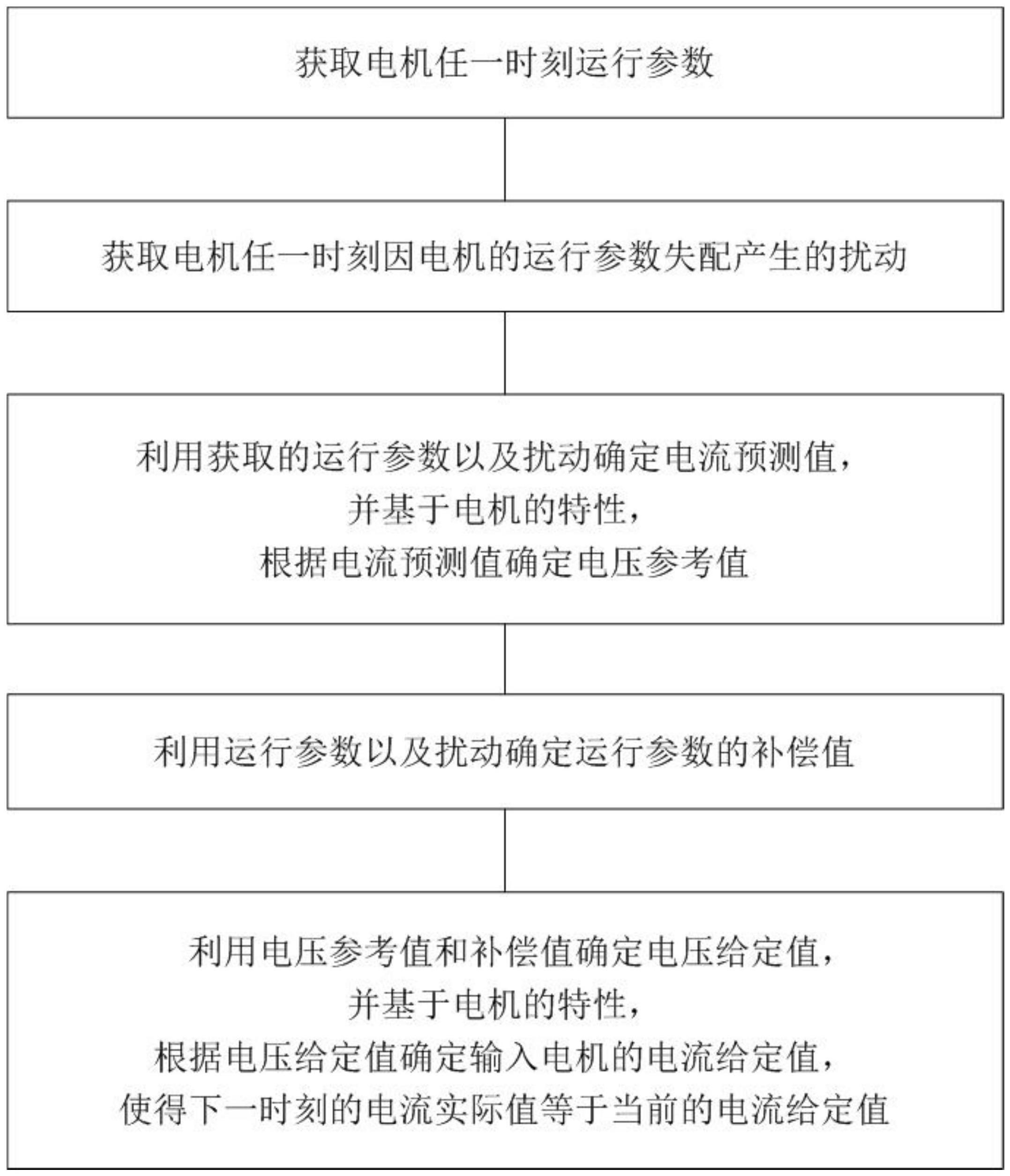
4、获取电机任一时刻运行参数;
5、获取电机任一时刻因电机的运行参数失配产生的扰动;
6、利用获取的运行参数以及扰动确定电流预测值,并基于电机的特性,根据电流预测值确定电压参考值;
7、利用运行参数以及扰动确定运行参数的补偿值;
8、利用电压参考值和补偿值确定电压给定值,并基于电机的特性,根据电压给定值确定输入电机的电流给定值,使得下一时刻的电流实际值等于当前的电流给定值。
9、进一步的,所述运行参数包括电流、电压、电感、磁链、电角速度和/或定子电阻的给定值和/或实际值。
10、进一步的,所述任一时刻包括当前时刻、前一历史时刻和/或前一历史时刻的前一历史时刻。
11、进一步的,所述扰动包括下式:
12、
13、式中,ed为d轴电流误差,k为时序,id为d轴电流实际值,为d轴电流预测值,为d轴扰动,ts为当前时序到下一时序的周期,β为参数,不同的下标表示为不同的参数,fal为非线性函数,eq为q轴电流误差,iq为q轴电流实际值,为q轴电流预测值,为q轴扰动。
14、进一步的,所述利用获取的运行参数以及扰动确定电流预测值包括:
15、
16、
17、式中,为d轴电流预测值,k为时序,ts为当前时序到下一时序的周期,下标z表示时变参数,rs为定子电阻,ld为d轴电感,lq为q轴电感,ωe为电角速度,iq为q轴电流实际值,ud*为d轴电压给定值,为d轴扰动,β为参数,不同的下标表示为不同的参数,fal为非线性函数,为q轴电流预测值,id为d轴电流实际值,为磁链,uq*为q轴电压给定值,为q轴扰动。
18、进一步的,所述利用运行参数以及扰动确定运行参数的补偿值包括:
19、
20、式中,a为补偿值,μ为神经网络,θμ为神经网络的超参,为d轴扰动,为q轴扰动。
21、进一步的,所述利用电压参考值和补偿值确定电压给定值,
22、udq*=udq0+a
23、式中:udq*为d-q轴电压给定值,udq0为d-q轴电压参考值,a为补偿值。
24、另一方面,本发明提供一种自抗扰无差拍的电流控制装置,包括:
25、第一获取模块,用于获取电机任一时刻运行参数;
26、第二获取模块,用于获取电机任一时刻因电机的运行参数失配产生的扰动;
27、电压确定模块,用于利用获取的运行参数以及扰动确定电流预测值,并基于电机的特性,根据电流预测值确定电压参考值;
28、补偿模块,用于利用运行参数以及扰动确定运行参数的补偿值;
29、电流确定模块,用于利用电压参考值和补偿值确定电压给定值,并基于电机的特性,根据电压给定值确定输入电机的电流给定值,使得下一时刻的电流实际值等于当前的电流给定值。
30、另一方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时,实现上述的自抗扰无差拍的电流控制方法。
31、另一方面,本发明提供一种设备,其特征在于,包括:
32、存储器,用于存储指令;
33、处理器,用于执行所述指令,使得所述设备执行实现上述的自抗扰无差拍的电流控制方法。
34、与现有技术相比,本发明所达到的有益效果:
35、本发明根据电机的实时运行参数和实时扰动确定电流预测值,以确定电压参考值,并根据实时运行参数和实时扰动确定对应的补偿值,以准确地确定电压给定值和电流给定值,并使得电流给定值与电流实际值无差拍。
36、本发明的自抗扰无差拍的电流控制方法解决了参数失配的干扰问题,具有良好的抗干扰性和稳定性,提高了控制结果的准确性。
技术特征:
1.一种自抗扰无差拍的电流控制方法,其特征在于,包括:
2.根据权利要求1所述的自抗扰无差拍的电流控制方法,其特征在于,所述运行参数包括电流、电压、电感、磁链、电角速度和/或定子电阻的给定值和/或实际值。
3.根据权利要求1所述的自抗扰无差拍的电流控制方法,其特征在于,所述任一时刻包括当前时刻、前一历史时刻和/或前一历史时刻的前一历史时刻。
4.根据权利要求1所述的自抗扰无差拍的电流控制方法,其特征在于,所述扰动包括下式:
5.根据权利要求1所述的自抗扰无差拍的电流控制方法,其特征在于,所述利用获取的运行参数以及扰动确定电流预测值包括:
6.根据权利要求1所述的自抗扰无差拍的电流控制方法,其特征在于,所述利用运行参数以及扰动确定运行参数的补偿值包括:
7.根据权利要求1所述的自抗扰无差拍的电流控制方法,其特征在于,所述利用电压参考值和补偿值确定电压给定值,
8.一种自抗扰无差拍的电流控制装置,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时,实现如权利要求1-7中任一项所述的自抗扰无差拍的电流控制方法。
10.一种设备,其特征在于,包括:
技术总结
本发明公开了一种自抗扰无差拍的电流控制方法、装置、介质及设备,其中电流控制方法,包括:获取电机任一时刻运行参数;获取电机任一时刻因电机的运行参数失配产生的扰动;利用获取的运行参数以及扰动确定电流预测值,并基于电机的特性,根据电流预测值确定电压参考值;利用运行参数以及扰动确定运行参数的补偿值;利用电压参考值和补偿值确定电压给定值,并基于电机的特性,根据电压给定值确定输入电机的电流给定值,使得下一时刻的电流实际值等于当前的电流给定值。本发明能够使永磁电机控制系统中的电流实际值等于电流给定值。
技术研发人员:周丽,王翌丞
受保护的技术使用者:南京信息工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!