基于仿真的激光雷达外参获取方法、电子设备和存储介质与流程
本发明涉及仿真,特别是涉及一种基于仿真的激光雷达外参获取方法、电子设备和存储介质。
背景技术:
1、当前,为提升机场运行效率与安全裕度,机场应用激光雷达来监视活动目标,例如民航客机模型、车辆、人员等。一方面,机场,尤其是长期运行机场的航站楼、廊桥等位置已经部署了大量的设施设备,现场环境复杂,在机场部署激光雷达需要在安装激光雷达之前进入机场内进行详细踏勘,挑选合适点位做测试,从而确定该点位是否能够满足监视需求。另一方面,进入机场管控区域开展测试需通过各类手续,费时费力、成本高昂,很难同时在多个预选点位同时测试,这就导致了很难通过实地测试的方式解决点位布局规划的问题。
技术实现思路
1、针对上述技术问题,本发明采用的技术方案为:
2、本发明实施例提供一种基于仿真的激光雷达外参获取方法,所述方法包括如下步骤:
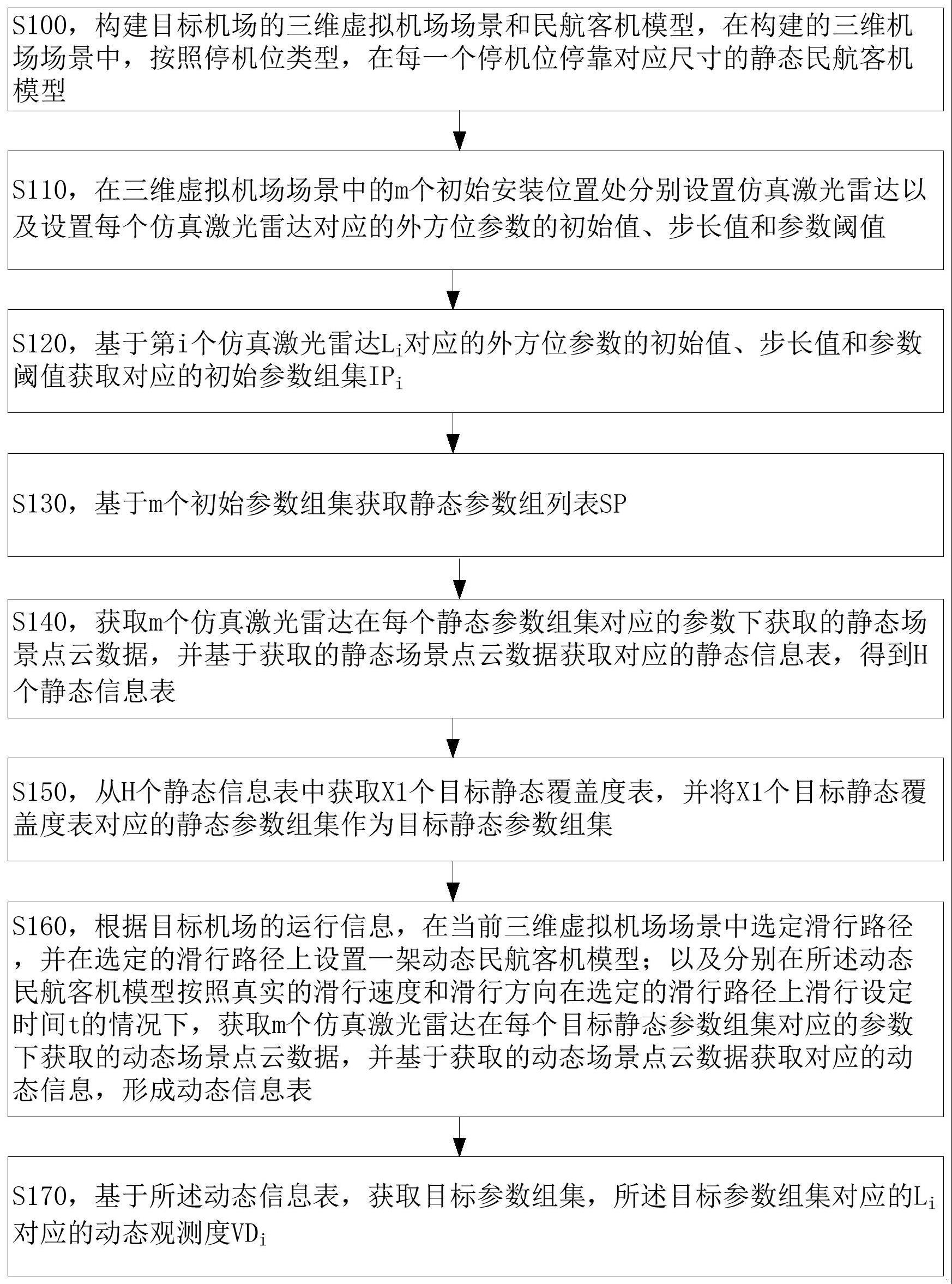
3、s100,构建目标机场的三维虚拟机场场景和民航客机模型,在构建的三维机场场景中,按照停机位类型,在每一个停机位停靠对应尺寸的静态民航客机模型;
4、s110,在三维虚拟机场场景中的m个初始安装位置处分别设置仿真激光雷达以及设置每个仿真激光雷达对应的外方位参数的初始值、步长值和参数阈值;
5、s120,基于第i个仿真激光雷达li对应的外方位参数的初始值、步长值和参数阈值获取对应的初始参数组集ipi;得到m个初始参数组集;其中i的取值为1到m;
6、s130,基于m个初始参数组集获取静态参数组列表sp={sp1,sp2,…,spr,…,sph},第r个静态参数组集spr={spr1,spr2,…,spri,…,sprm},spr中的第r个静态参数组spri∈ipi,r的取值为1到h,h为sp中的静态参数组集的数量;
7、s140,获取m个仿真激光雷达在每个静态参数组集对应的参数下获取的静态场景点云数据,并基于获取的静态场景点云数据获取对应的静态信息表,得到h个静态信息表;其中,每个静态信息表包括静态覆盖度表和静态观测度表,第r个静态信息表的静态覆盖度表的第b行包括(ab,crb),ab为静态民航客机模型中的第b个静态民航客机模型的id,crb为第r个静态参数组集对应的第b个静态民航客机模型的静态覆盖度,b的取值为1到n,n为静态民航客机模型的数量;第r个静态信息表的静态观测度表的第i行包括(bi,vsri),bi为li的id,vsri为第r个静态参数组集对应的li的静态观测度;
8、s150,从h个静态信息表中获取x1个目标静态覆盖度表,以及从x1个目标静态覆盖表对应的x1个静态观测度表中获取x2个目标静态观测度表,并将x2个目标静态观测度表对应的静态参数组集作为目标静态参数组集;其中,每个目标静态覆盖度表中的静态覆盖度大于第一设定阈值;每个目标静态观测度表对应的li的静态观测度vsi=max(vst1i,vst2i,…,vstdi,…,vstx1i),vstdi为x1静态观测度表中的第d个静态观测度表中的li对应的静态观测度,d的取值为1到x1;
9、s160,根据目标机场的运行信息,在当前三维虚拟机场场景中选定滑行路径,并在选定的滑行路径上设置一架动态民航客机模型;以及分别在所述动态民航客机模型按照真实的滑行速度和滑行方向在选定的滑行路径上滑行设定时间t的情况下,获取m个仿真激光雷达在每个目标静态参数组集对应的参数下获取的动态场景点云数据,并基于获取的动态场景点云数据获取对应的动态信息,形成动态信息表,其中,动态信息表的第u行包括(vdu1,vdu2,…,vdui,…,vdum),vdui为第u个目标静态参数集对应的li对应的动态观测度;
10、s170,基于所述动态信息表,获取目标参数组集,所述目标参数组集对应的li对应的动态观测度vdi=max(vd1i,vd2i,…,vdui,…,vdx2i)。
11、本发明实施例还提供一种非瞬时性计算机可读存储介质,所述存储介质中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由处理器加载并执行以实现前述方法。
12、本发明实施例还提供一种电子设备,其特征在于,包括处理器和前述的非瞬时性计算机可读存储介质。
13、本发明至少具有以下有益效果:
14、本发明提供的基于仿真的激光雷达外参获取方法,不需要进入机场管控区域开展测试就能准确获取激光雷达的目标参数,能够节约激光雷达布局的成本和时间。
技术特征:
1.一种基于仿真的激光雷达外参获取方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的方法,其特征在于,所述外方位参数至少包括仿真激光雷达的安装位置lx,ly、lz以及仿真激光雷达分别绕对应的安装位置的x轴、y轴和z轴的旋转角度lrx、lry和lyz,lx,ly、lz分别为仿真激光雷达的安装位置的x、y和z坐标。
3.根据权利要求1所述的方法,其特征在于,每个静态民航客机模型的静态覆盖度等于观测到该民航客机模型的雷达数量。
4.根据权利要求1所述的方法,其特征在于,每个仿真激光雷达的静态观测度等于该仿真激光雷达所能观测到的民航客机模型的数量。
5.根据权利要求1所述的方法,其特征在于,每个仿真激光雷达的动态观测度等于在t内观测到所述动态民航客机模型的关键特征的时刻数量。
6.根据权利要求3所述的方法,其特征在于,ipi基于如下步骤获取:
7.根据权利要求1所述的方法,其特征在于,在s110中,还包括设置每个仿真激光雷达的内部参数,所述内部参数至少包括垂直视场角、水平视场角、垂直分辨率和水平分辨率。
8.根据权利要求1所述的方法,其特征在于,所述场景点云数据基于双向反射率模型获取。
9.一种非瞬时性计算机可读存储介质,所述存储介质中存储有至少一条指令或至少一段程序,其特征在于,所述至少一条指令或所述至少一段程序由处理器加载并执行以实现如权利要求1-8中任意一项的所述方法。
10.一种电子设备,其特征在于,包括处理器和权利要求9中所述的非瞬时性计算机可读存储介质。
技术总结
本发明提供了一种基于仿真的激光雷达外参获取方法,包括:构建目标机场的三维虚拟机场场景和民航客机模型;在三维虚拟机场场景中分别设置仿真激光雷达;获取每个雷达的初始参数组集,得到m个初始参数组集;基于m个初始参数组集获取静态参数组列表,并基于静态信息表获取目标静态参数组集;获取基于m个仿真激光雷达在每个目标静态参数组集对应的参数下获取的动态场景点云数据得到的动态信息表;基于所述动态信息表,获取目标参数组集;基于目标参数组集,获取每个民航客机模型的覆盖度,如果存在覆盖度大于第二设定阈值的覆盖度,则对对应的仿真激光雷达的数量进行调整。本发明能够提高激光雷达的目标参数的获取效率。
技术研发人员:王鹏,王伟,高勇,刘江涛
受保护的技术使用者:中国民用航空总局第二研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!