一种结合深度学习和PID控制的盾构机自动驾驶方法及系统
本发明涉及自动驾驶,特别涉及一种结合深度学习和pid控制的盾构机沿设计轴线挖掘的自动驾驶方法及系统。
背景技术:
1、自动驾驶技术在汽车、高铁、地铁、船舶驾驶等领域有较多的研究,其中汽车自动驾驶技术是通过计算机系统和传感器等装置,使汽车能够在不需要人工干预的情况下进行行驶和操作。依靠感知系统获取周围环境信息,有必要检测其他车辆、行人和其他相关实体的存在。高铁或地铁自动驾驶依靠高铁轨道设施,利用轨道侦测器和位置参考信息实现自动驾驶。船舶自动驾驶技术依靠全球卫星导航系统、雷达和激光测距仪、摄像头和图像处理技术以及通信技术。但是,对于盾构机的自动驾驶技术目前并不完善。
2、盾构机的工作环境是在地下深处,一些传统的获取外界信息的工具(例如摄像头、gps定位系统、雷达等)无法使用。现有技术所采用的方法是结合人工智能领域中的机器学习、深度学习等技术训练模型控制盾构机的姿态,然而现有技术的该方法并没有达到盾构机自动驾驶向前挖掘的技术要求,其边界误差比较大。如果对盾构机挖掘控制失误,则易造成盾构机冒顶、磕头,地表沉降、塌方、隧道上浮、蛇形等问题。因此,可靠的盾构机自动驾驶模型驱使盾构机自动向前挖掘的方法,对提高掘进速度、效率和挖掘的精度有着十分重要的意义。
技术实现思路
1、本发明为了解决上述问题,目的在于提供一种结合深度学习和pid控制的盾构机沿设计轴线挖掘的自动驾驶方法、系统及存储介质。
2、为实现上述目的,本发明采用如下技术方案:
3、本发明提供一种结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于,包括以下步骤:
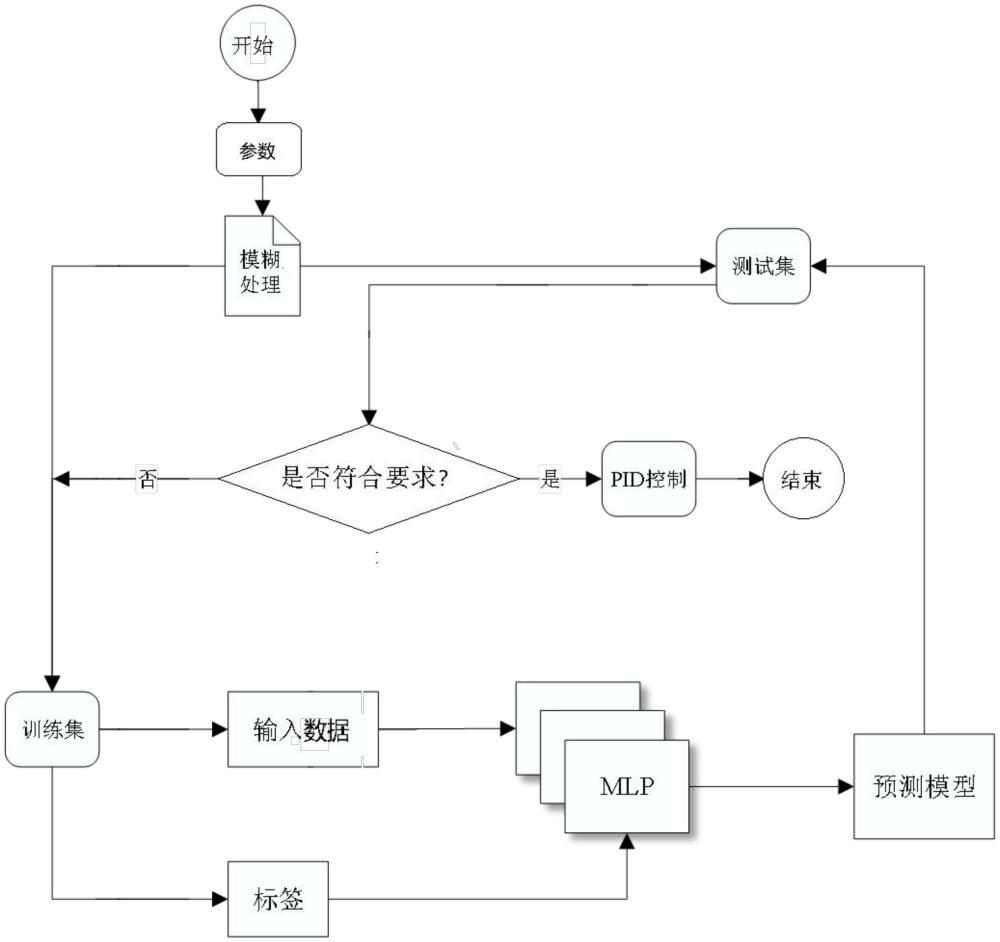
4、步骤s1:获取盾构机的参数;
5、步骤s2:将步骤s1获取的全部参数进行模糊处理,得到一组新数据;
6、步骤s3:将步骤s2得到的数据进行处理用作训练集,并把数据切分为输入数据和标签;
7、步骤s4:将步骤s3得到的数据输入到神经网络模型中进行迭代训练;
8、步骤s5:将步骤s4训练后模型的输出结果作为测试集数据,判断测试集数据是否符合迭代次数要求,若不符合则将测试集数据再反馈到步骤s3的训练集数据中,然后再次进行步骤s4的操作,直到达到迭代次数后终止训练,得到训练好的模型;
9、步骤s6:将步骤s5得到的训练好的模型作为预测模型,预测模型的输出预测结果;
10、步骤s7:将步骤s6得到的预测结果输入pid算法控制器,作为pid控制的过程变量;
11、步骤s8:利用pid算法控制器进行在线实时调节比例参数kp、积分参数ki、微分参数kd使达到最优值,然后利用最优值最终控制盾构机的挖掘工作。
12、进一步地,在本发明提供的结合深度学习和pid控制的盾构机自动驾驶方法中,还可以具有这样的特征:其中,步骤s1中所获取的参数包括盾构机的自身参数、外部环境参数和经纬高参数。
13、进一步地,在本发明提供的结合深度学习和pid控制的盾构机自动驾驶方法中,还可以具有这样的特征:其中,步骤s3的具体过程如下:
14、步骤s3-1:先对数据矩阵转换处理;
15、步骤s3-2:再把错误的数据筛选掉,保留正确的数据;
16、步骤s3-3:将5个方向位置的电流数据以及经纬高参数作为标签,其余参数作为输入数据。
17、进一步地,在本发明提供的结合深度学习和pid控制的盾构机自动驾驶方法中,还可以具有这样的特征:其中,步骤s4取步骤s3得到数据的前80%的数据作为训练集,后20%的数据作为验证集,将训练集的输入到mlp神经网络模型中进行迭代训练,输入层是把24个输入数据设置为24神经元,映射到隐藏层,采用relu激活函数,最后输出层是将数据降维到8个神经元,即5个方向位置的电流数据和3个经纬高参数。
18、进一步地,在本发明提供的结合深度学习和pid控制的盾构机自动驾驶方法中,还可以具有这样的特征:其中,mlp神经网络模型设置有3个隐藏层,第一层有64个神经元,第二层有128个神经元,第三层有64个神经元。
19、进一步地,在本发明提供的结合深度学习和pid控制的盾构机自动驾驶方法中,还可以具有这样的特征:其中,mlp神经网络模型设置有3个隐藏层,第一层有128个神经元,第二层有128个神经元,第三层有128个神经元。
20、进一步地,在本发明提供的结合深度学习和pid控制的盾构机自动驾驶方法中,还可以具有这样的特征:其中,步骤s6得到的预测结果为5个电流预测值和3个经纬高预测值,将该5个电流预测值和3个经纬高预测值作为pid控制的过程变量,pid算法控制器的期望输出是推力值,该推力值为盾构机待调整的目标值。
21、进一步地,在本发明提供的结合深度学习和pid控制的盾构机自动驾驶方法中,还可以具有这样的特征:其中,步骤s8在线实时调节比例参数kp、积分参数ki、微分参数kd的具体操作为:首先,初始化参数kp、ki、kd,用实时采集到的数据来计算系统误差,该误差为pid算法控制器的输入,再通过pid算法计算出新的控制输出。
22、本发明还提供一种盾构机自动驾驶系统,应用在上述结合深度学习和pid控制的盾构机自动驾驶方法中,其特征在于,包括:参数采集模块,用于获取盾构机的参数;mlp模块,具有预设的训练好的mlp神经网络模型,将盾构机的24个自身参数作为输入数据,输出结果为5个电流预测值以及3个经纬高预测值;pid模块,运行pid控制算法,将mlp模块得到的5个电流预测值和3个经纬高预测值作为pid控制的过程变量,pid算法控制器的期望输出是推力值;结果展示模块,用于展示pid模块的计算结果;盾构机执行控制模块,根据pid模块的计算结果对盾构机进行控制。
23、本发明还提供一种计算机可读存储介质,其上存储有计算机程序指令,计算机程序指令被处理器执行时实现上述的结合深度学习和pid控制的盾构机自动驾驶方法。
24、本发明的作用和效果:
25、本发明结合深度学习和pid控制的盾构机自动驾驶方法,通过盾构机自身参数、外部参数、地质情况数据和驾驶员操作盾构机行进时的动作,对这些参数代入到不同土层条件进行训练和学习,充分发挥了mlp深度学习的预测方法,保持了算法的鲁棒性、实时性和可解释性,同时通过结合pid控制算法提升准确率,从而实现盾构机在无人驾驶操作的情况下通过训练好的模型可以自主向前挖掘隧道的行为。该算法精确率较高,且盾构边界误差较低,得出结合mlp和pid控制算法在处于不同土层条件下能够精确挖掘。
技术特征:
1.一种结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于,包括以下步骤:
2.如权利要求1所述的结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于:
3.如权利要求2所述的结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于:
4.如权利要求3所述的结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于:
5.如权利要求4所述的结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于:
6.如权利要求4所述的结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于:
7.如权利要求4所述的结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于:
8.如权利要求1所述的结合深度学习和pid控制的盾构机自动驾驶方法,其特征在于:
9.一种盾构机自动驾驶系统,应用在如权利要求1~8中任意一项所述的结合深度学习和pid控制的盾构机自动驾驶方法中,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1~8中任意一项所述的结合深度学习和pid控制的盾构机自动驾驶方法。
技术总结
本发明提供一种结合深度学习和PID控制的盾构机自动驾驶方法及系统,该方法利用盾构机的自身参数、外部环境参数和经纬高参数这些参数,将参数代入到不同土层条件进行训练和学习,训练MLP神经网络模型,通过训练好MLP神经网络模型可以实现预测,输出电流预测值和经纬高预测值,同时,该方法通过结合PID控制算法提升准确率,从而实现盾构机在无人驾驶操作的情况下通过训练好的模型可以自主向前挖掘隧道的行为。本发明的盾构机自动驾驶方法的精确率较高,且盾构边界误差较低,得出结合MLP和PID控制算法在处于不同土层条件下能够精确挖掘。
技术研发人员:刘虎,徐锡斌,曹权,董文澎,万衡,吴玉怀,唐虎,喻斌
受保护的技术使用者:上海应用技术大学
技术研发日:
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!