协作机械臂的利记博彩app
本发明涉及协作机械臂领域,特别涉及一种协作机械臂。
背景技术:
1、近年来,随着协作机械臂产品的快速更新与高速发展,伴随着各个行业的应用普及,协作机械臂逐渐受到广泛的关注,其核心在于人机协作,结合协作机械臂灵活、智能、安全的特性,完成高精密度、不符合人体工学的手动工序,实现工业的自动化作业。
2、目前,市面上的协作机械臂一般包括底座、若干个臂体及驱动模组,若干个臂体之间依次衔接,通常是驱动模组主体设置于上一个臂体上,而输出端连接于下一个臂体,以在关节轴线方向上延伸布局,导致机械臂整体尺寸大,体积大、占用空间,无法适用于更多的应用场景。
技术实现思路
1、本发明的主要目的是提出一种协作机械臂,旨在解决现有的协作机械臂体积大、占用空间的技术问题。
2、为实现上述目的,本发明提出一种协作机械臂,该协作机械臂包括底座、若干臂体以及若干关节模组;
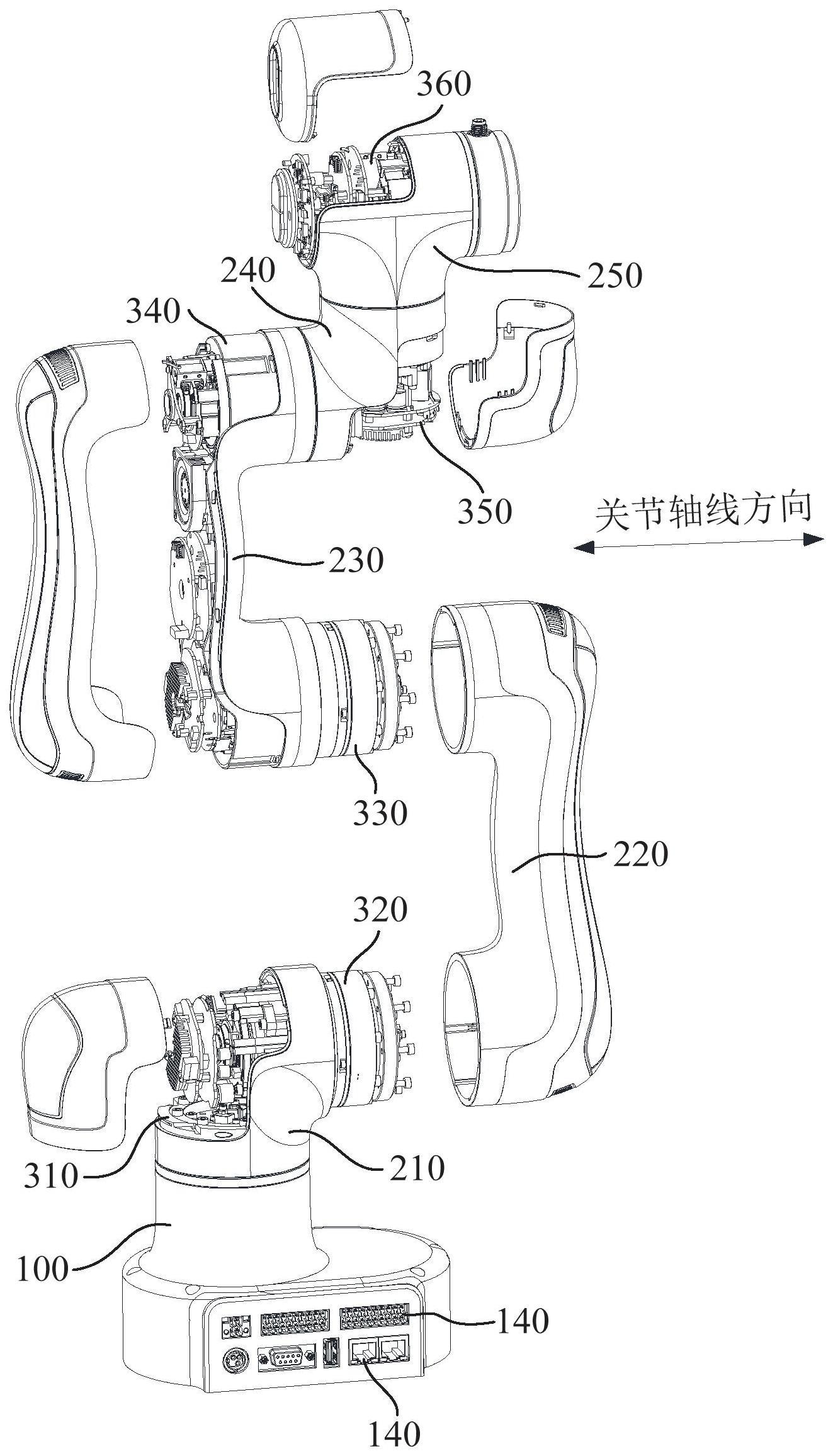
3、所述若干臂体包括依次对接的第一臂体、第二臂体和第三臂体,所述第一臂体对接于所述底座;所述若干关节模组包括第一关节模组、第二关节模组和第三关节模组,所述第一关节模组设于所述底座内,所述第一关节模组的输出端延伸至所述第一臂体内并与所述第一臂体连接;所述第二关节模组设于所述第一臂体内,所述第三关节模组设于所述第三臂体内,所述第二关节模组的输出端延伸至所述第二臂体内并与所述第二臂体的一端连接,所述第三关节模组的输出端延伸至所述第二臂体内并与所述第二臂体的相对另一端连接;
4、其中,所述第一关节模组的输出端的旋转轴线垂直于所述底座的安装面,所述第二关节模组的输出端的旋转轴线和所述第一关节模组的输出端的旋转轴线相垂直,且与所述第三关节模组的输出端的旋转轴线相平行;所述第二关节模组与所述第一关节模组在所述底座上的正投影至少部分相互重叠,所述第三关节模组与所述第二关节模组在所述底座上的正投影至少部分相互重叠。
5、在一些实施例中,所述若干臂体还包括第四臂体,所述第四臂体对接于所述第三臂体;
6、所述若干关节模组还包括第四关节模组,所述第四关节模组设于所述第三臂体内且与所述第三关节模组分别位于所述第三臂体的相对两端,所述第四关节模组的输出端延伸至所述第四臂体内并与所述第四臂体连接;
7、其中,所述第四关节模组的输出端的旋转轴线与所述第三关节模组的输出端的旋转轴线相平行,所述第四关节模组与所述第三关节模组在所述底座上的正投影至少部分相互重叠。
8、在一些实施例中,所述若干臂体还包括第五臂体,所述第五臂体对接于所述第四臂体;
9、所述若干关节模组还包括第五关节模组,所述第五关节模组设于所述第四臂体内,所述第五关节模组的输出端延伸至所述第五臂体内并与所述第五臂体连接;
10、其中,所述第五关节模组的输出端的旋转轴线与所述第四关节模组的输出端的旋转轴线相垂直,所述第五关节模组与所述第四关节模组在所述底座上的正投影不重叠。
11、在一些实施例中,所述若干关节模组还包括第六关节模组,所述第六关节模组设于所述第五臂体内,所述第六关节模组的输出端延伸至所述第五臂体外以用于连接末端执行器;
12、其中,所述第六关节模组的输出端的旋转轴线与所述第五关节模组的输出端的旋转轴线相垂直,所述第六关节模组与所述第五关节模组在所述底座上的正投影至少部分重叠。
13、在一些实施例中,所述第一关节模组包括第一电机和与所述第一电机连接的第一减速器,所述第一减速器的输入轴与所述第一电机的输出轴连接,所述第一减速器的输出轴穿设于所述第一电机的输出轴之内且一端连接有第一法兰盘,所述第一法兰盘连接所述第一臂体;和/或,
14、所述第二关节模组包括第二电机和与所述第二电机连接的第二减速器,所述第二减速器的输入轴与所述第二电机的输出轴连接,所述第二减速器的输出轴穿设于所述第二电机的输出轴之内且一端连接有第二法兰盘,所述第二法兰盘连接所述第二臂体;和/或,
15、所述第三关节模组包括第三电机和与所述第三电机连接的第三减速器,所述第三减速器的输入轴与所述第三电机的输出轴连接,所述第三减速器的输出轴穿设于所述第三电机的输出轴之内且一端连接有第三法兰盘,所述第三法兰盘连接所述第二臂体。
16、在一些实施例中,所述第四关节模组包括第四电机,所述第四电机为直驱电机,所述第四电机的输出轴与所述第四臂体连接;和/或,
17、所述第五关节模组包括第五电机,所述第五电机为直驱电机,所述第五电机的输出轴与所述第五臂体连接;和/或,
18、所述第六关节模组包括第六电机,所述第六电机为直驱电机,所述第五电机的输出轴连接有用于安装末端执行器的安装座。
19、在一些实施例中,所述底座内设有多块电路板,所述多块电路板沿所述底座的安装面的垂直方向层叠设置;
20、所述多块电路板中的一部分电路板位于所述第一关节模组的周侧,另一部分电路板位于所述第一关节模组的下方。
21、在一些实施例中,所述底座内构造有相连通的第一安装腔和第二安装腔,所述第一关节模组位于所述第一安装腔中且所述第一关节模组背离其输出端的一端延伸至所述第二安装腔中,所述多块电路板位于所述第二安装腔中。
22、在一些实施例中,所述底座内还设有散热器和散热风扇,所述散热器与一所述电路板上的元器件紧贴设置且位于相邻两所述电路板的间隔空间中,所述散热风扇位于所述多块电路板的一侧且其出风口朝向所述多块电路板。
23、在一些实施例中,所述底座的侧面设有多个接口;
24、所述接口形成通风口和/或所述接口的安装间隙形成通风间隙,以供所述底座内外空间进行气体交换。
25、本发明协作机械臂在运行时,通过第一关节模组的输出端带动第一臂体转动,第二关节模组的输出端带动第二臂体转动,第三关节模组的输出端带动第三臂体转动,其中,第三关节模组设于第三臂体内,且与第一臂体内的第二关节模组分别连接第二臂体的两端,提高了臂体空间利用率,可减小第二臂体沿关节轴线方向上的尺寸设计,并且,第二关节模组与第一关节模组在底座上的正投影至少部分相互重叠,以利用第一关节模组所占横向空间对应设置第二关节模组的部分结构,可减小第一臂体沿关节轴线方向上的尺寸设计,第三关节模组与第二关节模组在底座上的正投影至少部分相互重叠,以利用第二关节模组所占关节轴线方向空间对应设置第三关节模组,使得协作机械臂整体外形尺寸小,体积小,占用空间小,能够适用于更多的应用场景。
技术特征:
1.一种协作机械臂,其特征在于,包括底座、若干臂体以及若干关节模组;
2.根据权利要求1所述的协作机械臂,其特征在于,所述若干臂体还包括第四臂体,所述第四臂体对接于所述第三臂体;
3.根据权利要求2所述的协作机械臂,其特征在于,所述若干臂体还包括第五臂体,所述第五臂体对接于所述第四臂体;
4.根据权利要求3所述的协作机械臂,其特征在于,
5.根据权利要求1所述的协作机械臂,其特征在于,所述第一关节模组包括第一电机和与所述第一电机连接的第一减速器,所述第一减速器的输入轴与所述第一电机的输出轴连接,所述第一减速器的输出轴穿设于所述第一电机的输出轴之内且一端连接有第一法兰盘,所述第一法兰盘连接所述第一臂体;和/或,
6.根据权利要求4所述的协作机械臂,其特征在于,所述第四关节模组包括第四电机,所述第四电机为直驱电机,所述第四电机的输出轴与所述第四臂体连接;和/或,
7.根据权利要求1所述的协作机械臂,其特征在于,所述底座内设有多块电路板,所述多块电路板沿所述底座的安装面的垂直方向层叠设置;
8.根据权利要求7所述的协作机械臂,其特征在于,所述底座内构造有相连通的第一安装腔和第二安装腔,所述第一关节模组位于所述第一安装腔中且所述第一关节模组背离其输出端的一端延伸至所述第二安装腔中,所述多块电路板位于所述第二安装腔中。
9.根据权利要求7所述的协作机械臂,其特征在于,所述底座内还设有散热器和散热风扇,所述散热器与一所述电路板上的元器件紧贴设置且位于相邻两所述电路板的间隔空间中,所述散热风扇位于所述多块电路板的一侧且其出风口朝向所述多块电路板。
10.根据权利要求9所述的协作机械臂,其特征在于,所述底座的侧面设有多个接口;
技术总结
本发明公开一种协作机械臂,包括底座、若干臂体以及若干关节模组;若干臂体包括依次对接的第一臂体、第二臂体和第三臂体;若干关节模组包括第一关节模组、第二关节模组和第三关节模组,第一关节模组设于底座内;第二关节模组设于第一臂体内,第三关节模组设于第三臂体内;其中,第一关节模组的输出端的旋转轴线垂直于底座的安装面,第二关节模组的输出端的旋转轴线和第一关节模组的输出端的旋转轴线相垂直,且与第三关节模组的输出端的旋转轴线相平行;第二关节模组与第一关节模组在底座上的正投影至少部分相互重叠,第三关节模组与第二关节模组在底座上的正投影至少部分相互重叠。本发明协作机械臂整体外形尺寸小,体积小,占用空间小。
技术研发人员:叶伟智,赵逸森,陈汉辉,王重彬
受保护的技术使用者:深圳市越疆科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!