一种家庭智能整理机器人
本发明涉及智能机器人领域,具体涉及一种家庭智能整理机器人。
背景技术:
1、整理机器人主要功能在于完成特定区域内物品的整理工作,包括了仓库整理机器人、餐厅整理机器人、图书整理机器人等等。目前市面上的家用的家庭智能整理机器人暂时还是一大空缺,随着社会的发展和科学的进步,人们对生活质量的要求越来越高,时间观念逐渐加强,日程安排密集,一些生活琐事不应该占据人们过多的时间,因此智能化的家用机器人也越来越受人们的青睐。
2、市场上传统的各类家用机器人功能主要是完成各种地面的清扫,例如,专利号为cn106725103a的中国专利公开了一种新型家用机器人,包括机器人本体,机器人本体的外侧底部或侧部向外伸出有一个或多个吸嘴,吸嘴可选择性地伸出或收回于机器人本体,可以对墙边和墙角处的地面进行有效清扫,但无法对桌面、沙发等家庭高处环境进行智能识别和清洁,难以做到对多种不同物品的抓取。
技术实现思路
1、针对上述领域中存在的问题,本发明公开了一种家庭智能整理机器人,以解决无法智能识别在地面各处散落的生活用品,从而难以做到对多种不同物品的抓取的技术问题。
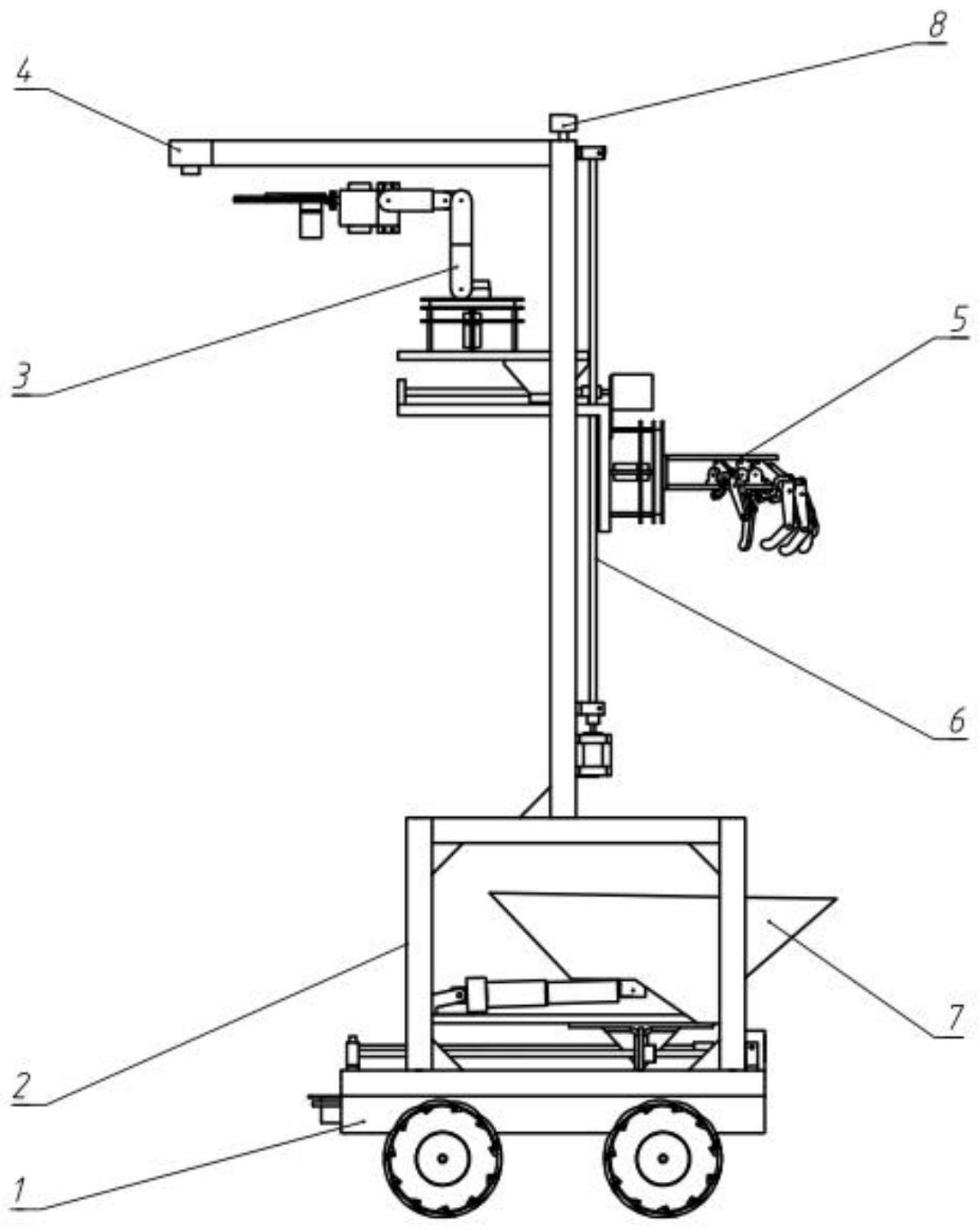
2、为解决上述技术问题,本发明提供了一种家庭智能整理机器人,所述车体的顶部架设有全局摄像头,用于识别并寻找杂乱环境中的物品并获取其坐标;
3、所述车体垂直方向的一侧固定设置有直角坐标微调机构,所述直角坐标微调机构的一侧固定设置有支撑杆,所述支撑杆的一端固定连接有转盘,所述转盘的输出轴固定连接有第一舵机,所述第一舵机的输出轴通过第二舵机支架固定连接有第二舵机,所述第二舵机的输出轴固定连接有连接架,所述连接架的另一端固定连接有第三舵机,所述第三舵机的输出轴固定连接有第三舵机支架,所述第三舵机支架的另一端与所述连接架固定连接,所述连接架的另一端固定连接有第四舵机,所述第四舵机的输出轴设置有夹取式机械手,通过控制所述直角坐标微调机构使得夹取式机械手的状态微调,抓取物品。
4、优选地,所述车体的底端固定连接有底盘,所述底盘的底端设置有四个电机支架,每个电机支架固定连接有伺服电机,每个所述伺服电机的输出轴通过联轴器连接有麦克纳姆轮,驱动所述麦克纳姆轮运动。
5、优选地,所述底盘的顶端固定设置有机架,所述机架通过光轴铰接有翻斗,所述翻斗的一端铰接有电动推杆,所述电动推杆的另一端与所述机架铰接,所述机架的顶端设置有步进电机;当机器人完成抓取后,所述步进电机通过带动丝杠推进所述翻斗前后运动;当收纳完成后,机器人控制所述电动推杆进行工作改变翻斗姿态,实现物品的翻倒归类,完成整理工作。
6、优选地,还包括灵巧手,所述灵巧手设置在直角坐标微调机构的另一侧,由多个舵机分别驱动,控制所述灵巧手的手指改变姿态。
7、优选地,还包括高清广角摄像头,所述高清广角摄像头固定设置在所述车体的顶部靠近所述夹取式机械手的一侧。
8、优选地,四个所述麦克纳姆轮分别由四个所述伺服电机单独控制进行全向运动。
9、优选地,所述底盘的前后端均安装有避障传感器。
10、优选地,还包括控制芯片,所述底盘的一侧固定设置有激光雷达,所述激光雷达和所述伺服电机均与所述控制芯片相连。
11、与现有技术相比,本发明具有如下有益效果:
12、1.设计的直角坐标微调机构和六自由度机械手相互融合的工作模式,可以对物品的坐标进行精确调整,利用机器人的整体运动控制过程以及对物品的抓取和放置,实现机器人完全自主的将物品分类整理到常用位置,完全释放人力;
13、2.通过四个麦克纳姆轮的全向驱动,实现机器人多自由度移动;机器人带有六自由度机械手,有超过3个自由度的工作范围,可以自主夹取放置各类物品,且翻斗收纳系统可以运载部分较重物品;
14、3.激光雷达可以实现多路径规划,多个避障传感器可以避障,从而实现机器人的全覆盖高效工作;高清广角摄像头的自主识别取物坐标,驱动机械臂,实现物品的智能识别抓取;
15、4.通过多次记忆取放物品的位置来记忆人们的日常生活摆放习惯,实现对家庭物品位置的记忆规划,借助图像识别技术来对家中物品进行识别记忆,控制机械臂将抓取物放置至合适位置。
技术特征:
1.一种家庭智能整理机器人,包括车体(2),其特征在于:
2.根据权利要求1所述的一种家庭智能整理机器人,其特征在于,所述车体(2)的底端固定连接有底盘(1-2),所述底盘(1-2)的底端设置有四个电机支架(1-5),每个电机支架(1-5)固定连接有伺服电机(1-6),每个所述伺服电机(1-6)的输出轴通过联轴器(1-4)连接有麦克纳姆轮(1-3),驱动所述麦克纳姆轮(1-3)运动。
3.根据权利要求2所述的一种家庭智能整理机器人,其特征在于,所述底盘(1-2)的顶端固定设置有机架(7-1),所述机架(7-1)通过光轴(7-6)铰接有翻斗(7-3),所述翻斗(7-3)的一端铰接有电动推杆(7-4),所述电动推杆(7-4)的另一端与所述机架(7-1)铰接,所述机架(7-1)的顶端设置有步进电机(7-2);当机器人完成抓取后,所述步进电机(7-2)通过带动丝杠(7-5)推进所述翻斗(7-3)前后运动;当收纳完成后,机器人控制所述电动推杆(7-4)进行工作改变翻斗姿态,实现物品的翻倒归类,完成整理工作。
4.根据权利要求1所述的一种家庭智能整理机器人,其特征在于,还包括灵巧手(5),所述灵巧手(5)设置在直角坐标微调机构(6)的另一侧,由多个舵机分别驱动,控制所述灵巧手(5)的手指改变姿态。
5.根据权利要求1所述的一种家庭智能整理机器人,其特征在于,还包括高清广角摄像头(4),所述高清广角摄像头(4)固定设置在所述车体(2)的顶部靠近所述夹取式机械手(3-11)的一侧。
6.根据权利要求2所述的一种家庭智能整理机器人,其特征在于,四个所述麦克纳姆轮(1-3)分别由四个所述伺服电机(1-6)单独控制进行全向运动。
7.根据权利要求2所述的一种家庭智能整理机器人,其特征在于,所述底盘(1-2)的前后端均安装有避障传感器。
8.根据权利要求2所述的一种家庭智能整理机器人,其特征在于,还包括控制芯片,所述底盘(1-2)的一侧固定设置有激光雷达(1-1),所述激光雷达(1-1)和所述伺服电机(1-6)均与所述控制芯片相连。
技术总结
本发明公开了一种家庭智能整理机器人,属于智能机器人领域,包括车体,车体的顶部架设有全局摄像头,用于识别并寻找杂乱环境中的物品并获取其坐标;车体垂直方向的一侧固定设置有直角坐标微调机构,直角坐标微调机构的一侧固定设置有支撑杆,支撑杆的一端固定连接有转盘,转盘的输出轴依次固定连接有第一舵机、第二舵机、第三舵机和第四舵机,第四舵机的输出轴设置有夹取式机械手,通过控制直角坐标微调机构使得夹取式机械手的状态微调,抓取物品。该家庭智能整理机器人可以智能识别杂乱环境中的物品并获取其坐标,自主的将识别的物品进行抓取、分类整理到常用位置,完全释放人力。
技术研发人员:赵华成,徐高欢,李增芳,刘武,刘政,李文婧
受保护的技术使用者:浙江水利水电学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!